 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Pixel-Based Deep Active Inference for Body Perception and Action
Paper and Code
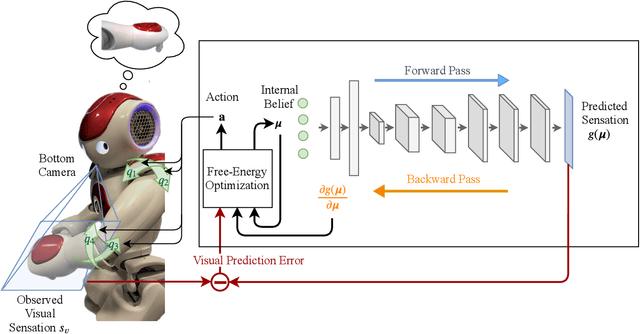

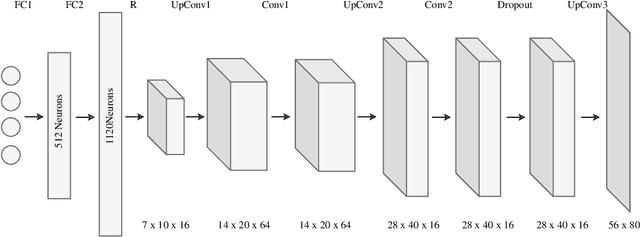

We present a pixel-based deep Active Inference algorithm (PixelAI) inspired in human body perception and successfully validated in robot body perception and action as a use case. Our algorithm combines the free energy principle from neuroscience, rooted in variational inference, with deep convolutional decoders to scale the algorithm to directly deal with images input and provide online adaptive inference. The approach enables the robot to perform 1) dynamical body estimation of arm using only raw monocular camera images and 2) autonomous reaching to "imagined" arm poses in the visual space. We statistically analyzed the algorithm performance in a simulated and a real Nao robot. Results show how the same algorithm deals with both perception an action, modelled as an inference optimization problem.