Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Differentiable 6DoF Object Pose Estimation with Local and Global Constraints
Paper and Code
Nov 22, 2020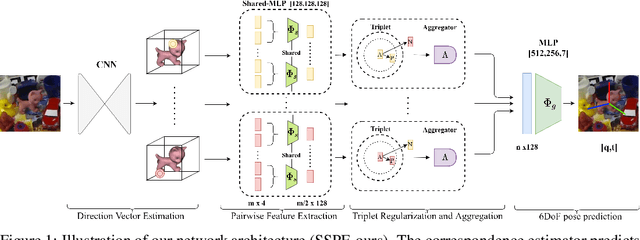
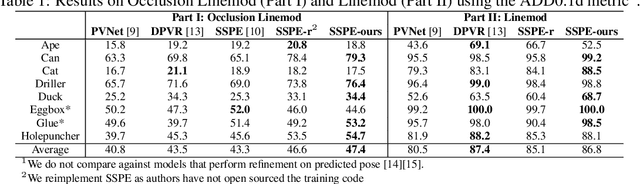
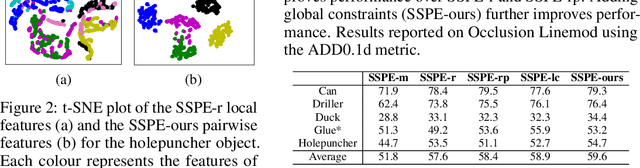
Inferring the 6DoF pose of an object from a single RGB image is an important but challenging task, especially under heavy occlusion. While recent approaches improve upon the two stage approaches by training an end-to-end pipeline, they do not leverage local and global constraints. In this paper, we propose pairwise feature extraction to integrate local constraints, and triplet regularization to integrate global constraints for improved 6DoF object pose estimation. Coupled with better augmentation, our approach achieves state of the art results on the challenging Occlusion Linemod dataset, with a 9% improvement over the previous state of the art, and achieves competitive results on the Linemod dataset.
* Accepted at the Workshop on Differentiable vision, graphics, and
physics applied to machine learning at Neurips 2020
View paper on