 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmpirical Analysis of Bi-directional Wi-Fi Network Performance on Mobile Robots and Connected Vehicles
Paper and Code
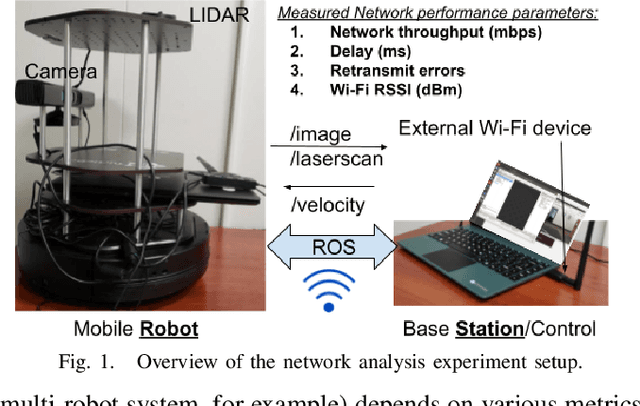

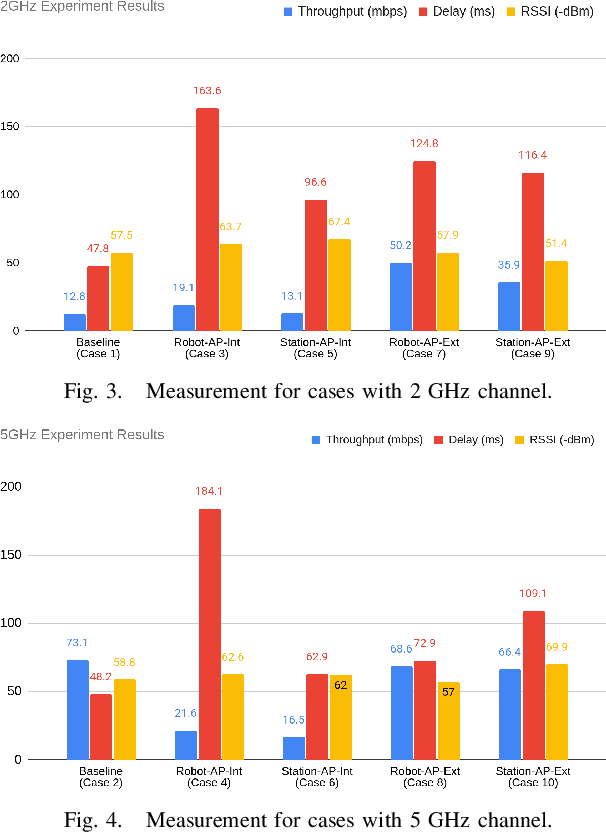

This paper proposes a framework to measure the important metrics (throughput, delay, packet retransmits, signal strength, etc.) to determine Wi-Fi network performance of mobile robots supported by the Robot Operating Systems (ROS) middleware. We analyze the bidirectional network performance of mobile robots and connected vehicles through an experimental setup, where a mobile robot is communicating vital sensor data such as video streaming from the camera(s) and LiDAR scan values to a command station while it navigates an indoor environment through teleoperated velocity commands received from the command station. The experiments evaluate the performance under 2.4 GHz and 5 GHz channels with different placement of Access Points (AP) with up to two network devices on each side. The discussions and insights from this study apply to the general vehicular networks and the field robotics community, where the wireless network plays a key role in enabling the success of robotic missions.