 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Learning by Directed Acyclic Graph For Resource Constrained Prediction
Paper and Code
Oct 26, 2015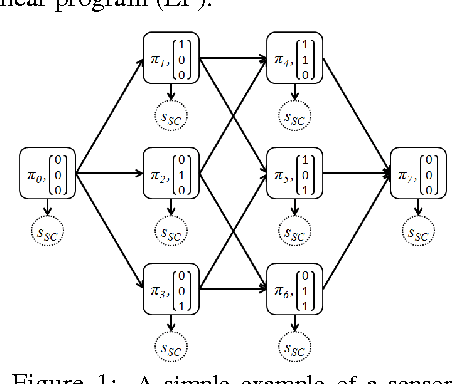
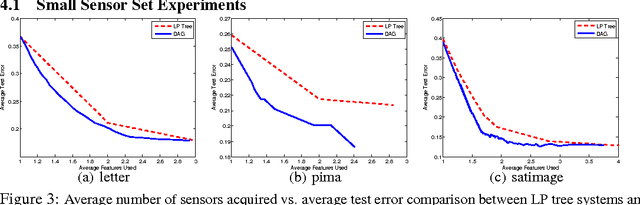
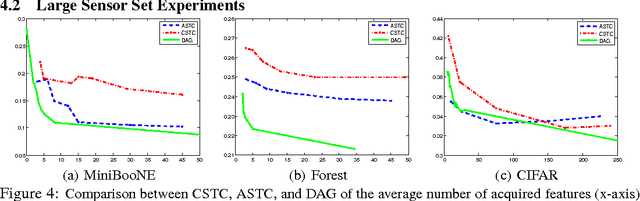
We study the problem of reducing test-time acquisition costs in classification systems. Our goal is to learn decision rules that adaptively select sensors for each example as necessary to make a confident prediction. We model our system as a directed acyclic graph (DAG) where internal nodes correspond to sensor subsets and decision functions at each node choose whether to acquire a new sensor or classify using the available measurements. This problem can be naturally posed as an empirical risk minimization over training data. Rather than jointly optimizing such a highly coupled and non-convex problem over all decision nodes, we propose an efficient algorithm motivated by dynamic programming. We learn node policies in the DAG by reducing the global objective to a series of cost sensitive learning problems. Our approach is computationally efficient and has proven guarantees of convergence to the optimal system for a fixed architecture. In addition, we present an extension to map other budgeted learning problems with large number of sensors to our DAG architecture and demonstrate empirical performance exceeding state-of-the-art algorithms for data composed of both few and many sensors.