Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Exploration through Intrinsic Motivation Learning for Unsupervised Subgoal Discovery in Model-Free Hierarchical Reinforcement Learning
Paper and Code
Nov 18, 2019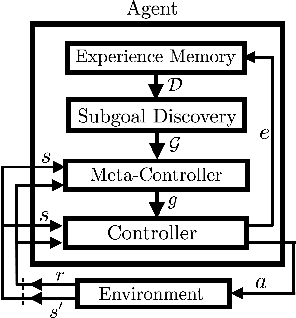

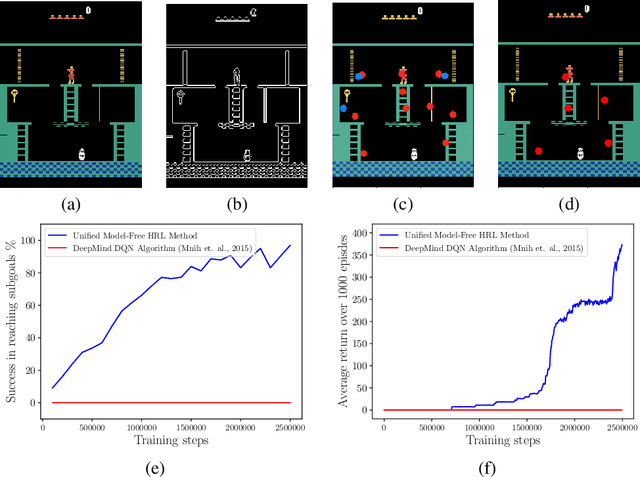
Efficient exploration for automatic subgoal discovery is a challenging problem in Hierarchical Reinforcement Learning (HRL). In this paper, we show that intrinsic motivation learning increases the efficiency of exploration, leading to successful subgoal discovery. We introduce a model-free subgoal discovery method based on unsupervised learning over a limited memory of agent's experiences during intrinsic motivation. Additionally, we offer a unified approach to learning representations in model-free HRL.
* arXiv admin note: substantial text overlap with arXiv:1810.10096
View paper on