 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient constraint propagation engines
Paper and Code
Nov 02, 2006

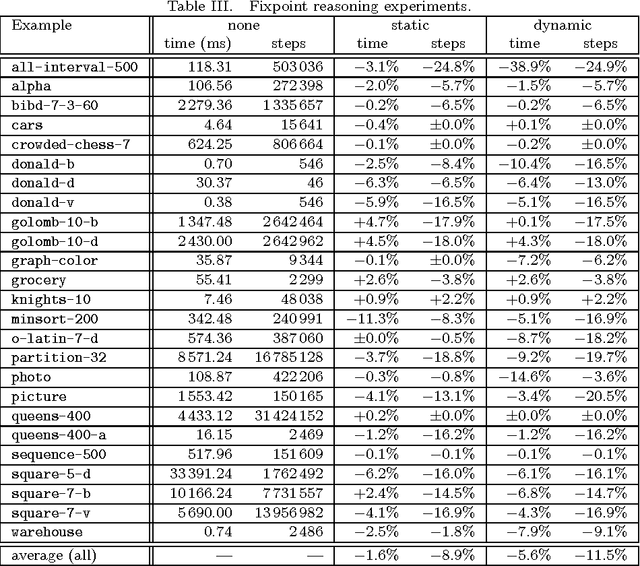

This paper presents a model and implementation techniques for speeding up constraint propagation. Three fundamental approaches to improving constraint propagation based on propagators as implementations of constraints are explored: keeping track of which propagators are at fixpoint, choosing which propagator to apply next, and how to combine several propagators for the same constraint. We show how idempotence reasoning and events help track fixpoints more accurately. We improve these methods by using them dynamically (taking into account current domains to improve accuracy). We define priority-based approaches to choosing a next propagator and show that dynamic priorities can improve propagation. We illustrate that the use of multiple propagators for the same constraint can be advantageous with priorities, and introduce staged propagators that combine the effects of multiple propagators with priorities for greater efficiency.