 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Constellation-Based Map-Merging for Semantic SLAM
Paper and Code
Mar 05, 2019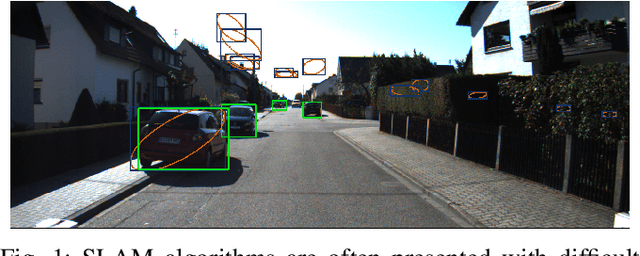
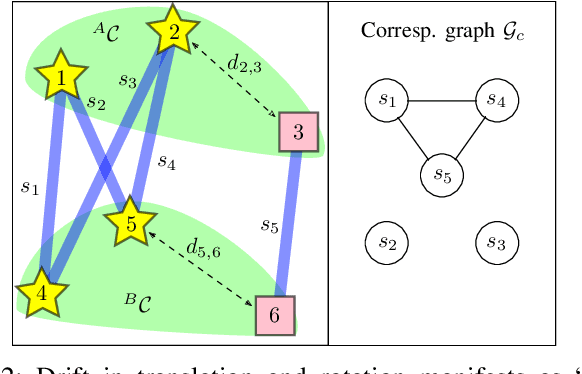
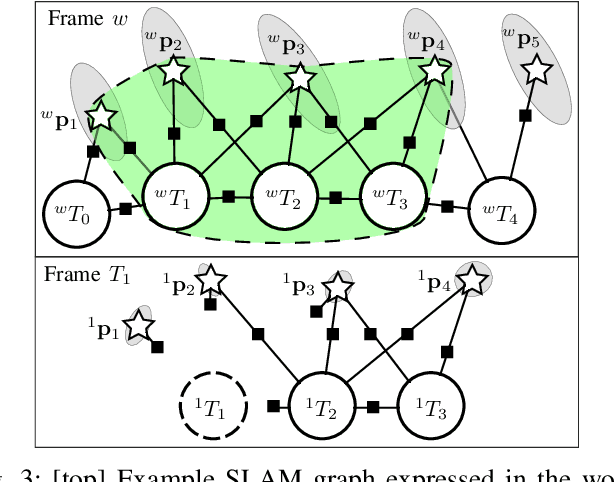
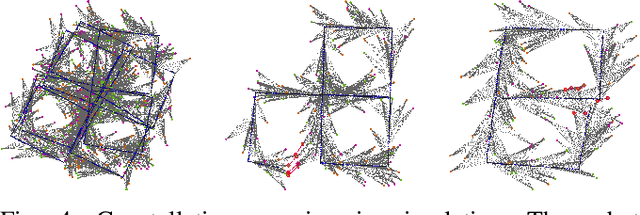
Data association in SLAM is fundamentally challenging, and handling ambiguity well is crucial to achieve robust operation in real-world environments. When ambiguous measurements arise, conservatism often mandates that the measurement is discarded or a new landmark is initialized rather than risking an incorrect association. To address the inevitable `duplicate' landmarks that arise, we present an efficient map-merging framework to detect duplicate constellations of landmarks, providing a high-confidence loop-closure mechanism well-suited for object-level SLAM. This approach uses an incrementally-computable approximation of landmark uncertainty that only depends on local information in the SLAM graph, avoiding expensive recovery of the full system covariance matrix. This enables a search based on geometric consistency (GC) (rather than full joint compatibility (JC)) that inexpensively reduces the search space to a handful of `best' hypotheses. Furthermore, we reformulate the commonly-used interpretation tree to allow for more efficient integration of clique-based pairwise compatibility, accelerating the branch-and-bound max-cardinality search. Our method is demonstrated to match the performance of full JC methods at significantly-reduced computational cost, facilitating robust object-based loop-closure over large SLAM problems.