 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Robust Pedestrian Detection using Deep Learning for Human-Aware Navigation
Paper and Code
Dec 13, 2018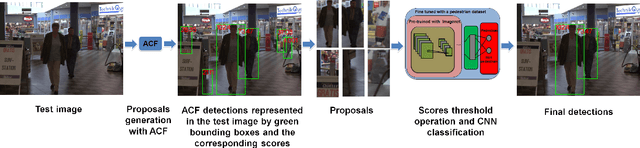
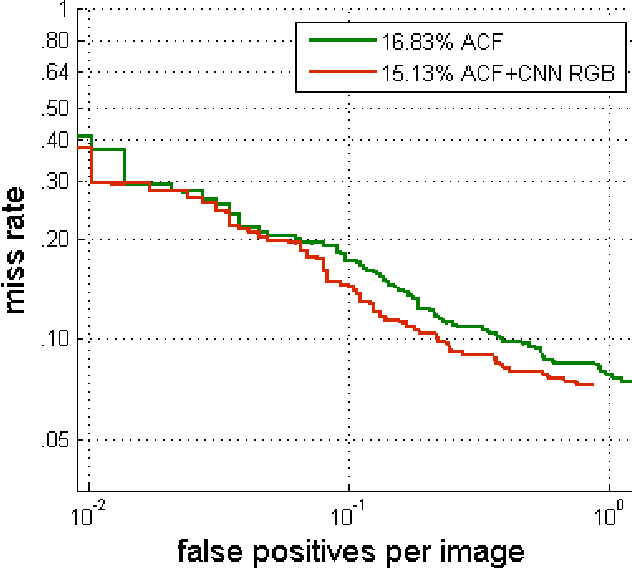
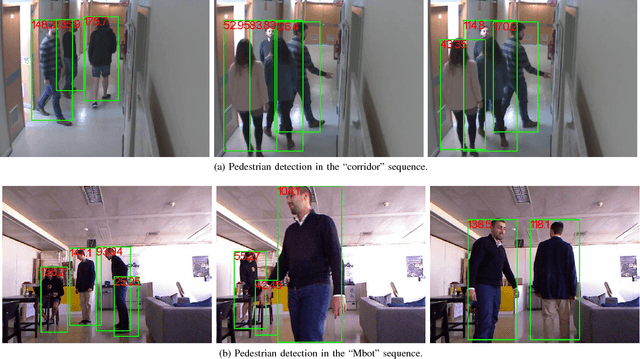
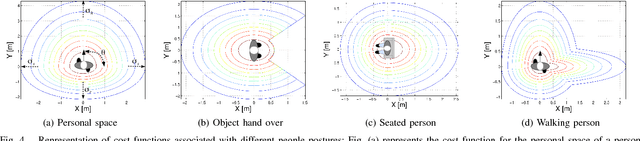
This paper addresses the problem of Human-Aware Navigation (HAN), using multi camera sensors to implement a vision-based person tracking system. The main contributions of this paper are as follows: a novel and efficient Deep Learning person detection and a standardization of human-aware constraints. In the first stage of the approach, we propose to cascade the Aggregate Channel Features (ACF) detector with a deep Convolutional Neural Network (CNN) to achieve fast and accurate Pedestrian Detection (PD). Regarding the human awareness (that can be defined as constraints associated with the robot's motion), we use a mixture of asymmetric Gaussian functions, to define the cost functions associated to each constraint. Both methods proposed herein are evaluated individually to measure the impact of each of the components. The final solution (including both the proposed pedestrian detection and the human-aware constraints) is tested in a typical domestic indoor scenario, in four distinct experiments. The results show that the robot is able to cope with human-aware constraints, defined after common proxemics and social rules.