 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffects of Interruptibility-Aware Robot Behavior
Paper and Code
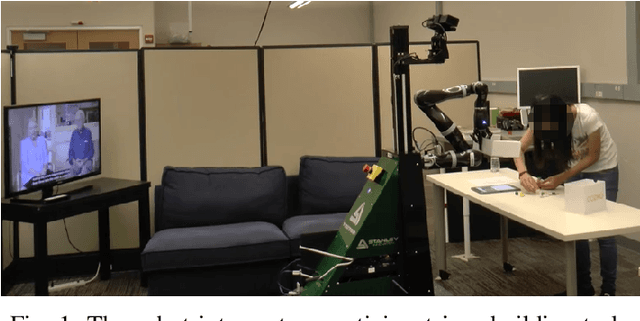
As robots become increasingly prevalent in human environments, there will inevitably be times when a robot needs to interrupt a human to initiate an interaction. Our work introduces the first interruptibility-aware mobile robot system, and evaluates the effects of interruptibility-awareness on human task performance, robot task performance, and on human interpretation of the robot's social aptitude. Our results show that our robot is effective at predicting interruptibility at high accuracy, allowing it to interrupt at more appropriate times. Results of a large-scale user study show that while participants are able to maintain task performance even in the presence of interruptions, interruptibility-awareness improves the robot's task performance and improves participant social perception of the robot.