 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEDGI: Equivariant Diffusion for Planning with Embodied Agents
Paper and Code
Mar 22, 2023
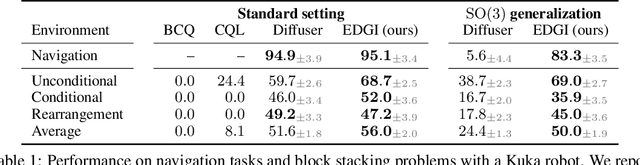
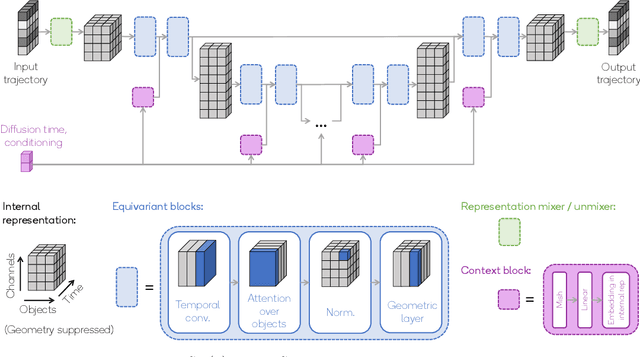
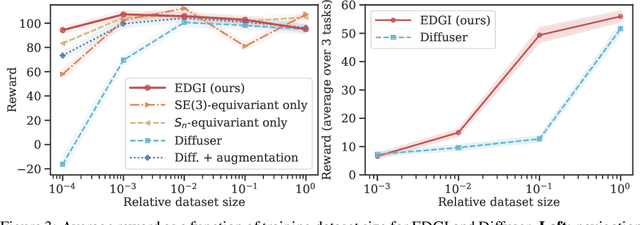
Embodied agents operate in a structured world, often solving tasks with spatial, temporal, and permutation symmetries. Most algorithms for planning and model-based reinforcement learning (MBRL) do not take this rich geometric structure into account, leading to sample inefficiency and poor generalization. We introduce the Equivariant Diffuser for Generating Interactions (EDGI), an algorithm for MBRL and planning that is equivariant with respect to the product of the spatial symmetry group $\mathrm{SE(3)}$, the discrete-time translation group $\mathbb{Z}$, and the object permutation group $\mathrm{S}_n$. EDGI follows the Diffuser framework (Janner et al. 2022) in treating both learning a world model and planning in it as a conditional generative modeling problem, training a diffusion model on an offline trajectory dataset. We introduce a new $\mathrm{SE(3)} \times \mathbb{Z} \times \mathrm{S}_n$-equivariant diffusion model that supports multiple representations. We integrate this model in a planning loop, where conditioning and classifier-based guidance allow us to softly break the symmetry for specific tasks as needed. On navigation and object manipulation tasks, EDGI improves sample efficiency and generalization.