 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeECNNs: Ensemble Learning Methods for Improving Planar Grasp Quality Estimation
Paper and Code
May 01, 2021
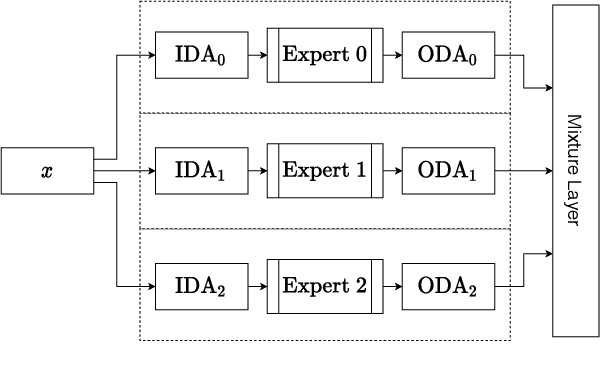
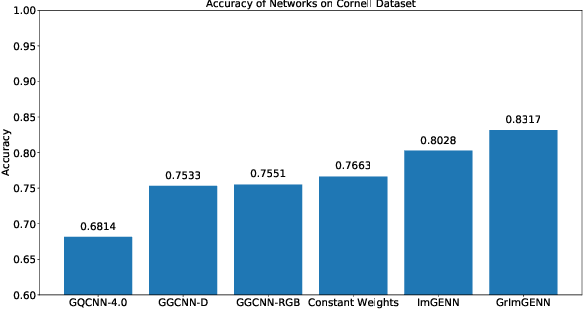

We present an ensemble learning methodology that combines multiple existing robotic grasp synthesis algorithms and obtain a success rate that is significantly better than the individual algorithms. The methodology treats the grasping algorithms as "experts" providing grasp "opinions". An Ensemble Convolutional Neural Network (ECNN) is trained using a Mixture of Experts (MOE) model that integrates these opinions and determines the final grasping decision. The ECNN introduces minimal computational cost overhead, and the network can virtually run as fast as the slowest expert. We test this architecture using open-source algorithms in the literature by adopting GQCNN 4.0, GGCNN and a custom variation of GGCNN as experts and obtained a 6% increase in the grasp success on the Cornell Dataset compared to the best-performing individual algorithm. The performance of the method is also demonstrated using a Franka Emika Panda arm.