 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEasing Reliance on Collision-free Planning with Contact-aware Control
Paper and Code
Sep 26, 2021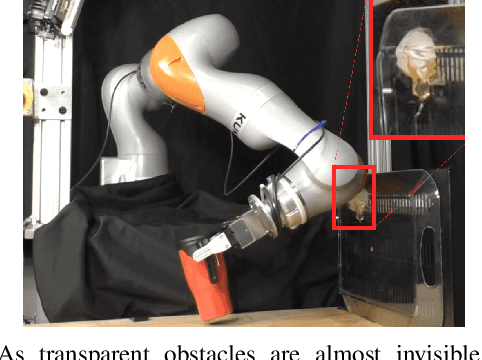
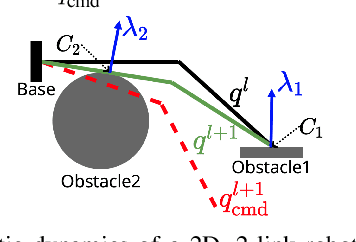


We believe that the future of robot motion planning will look very different than how it looks today: instead of complex collision avoidance trajectories with a brittle dependence on sensing and estimation of the environment, motion plans should consist of smooth, simple trajectories and be executed by robots that are not afraid of making contact. Here we present a "contact-aware" controller which continues to execute a given trajectory despite unexpected collisions while keeping the contact force stable and small. We introduce a quadratic programming (QP) formulation, which minimizes a trajectory-tracking error subject to quasistatic dynamics and contact-force constraints. Compared with the classical null-space projection technique, the inequality constraint on contact forces in the proposed QP controller allows for more gentle release when the robot comes out of contact. In the quasistatic dynamics model, control actions consist only of commanded joint positions, allowing the QP controller to run on stiffness-controlled robots which do not have a straightforward torque-control interface nor accurate dynamic models. The effectiveness of the proposed QP controller is demonstrated on a KUKA iiwa arm.