 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeE(n)-equivariant Graph Neural Cellular Automata
Paper and Code
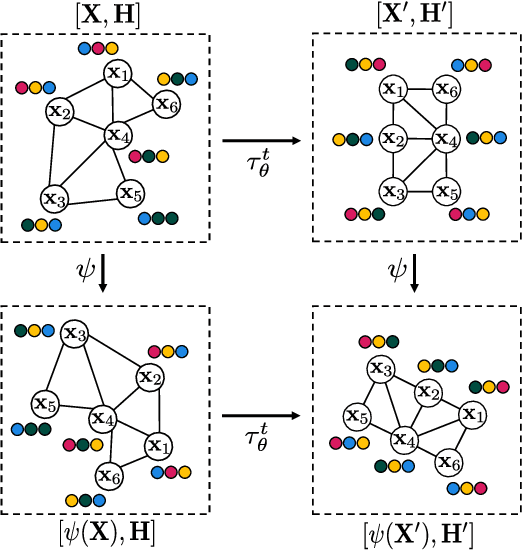

Cellular automata (CAs) are computational models exhibiting rich dynamics emerging from the local interaction of cells arranged in a regular lattice. Graph CAs (GCAs) generalise standard CAs by allowing for arbitrary graphs rather than regular lattices, similar to how Graph Neural Networks (GNNs) generalise Convolutional NNs. Recently, Graph Neural CAs (GNCAs) have been proposed as models built on top of standard GNNs that can be trained to approximate the transition rule of any arbitrary GCA. Existing GNCAs are anisotropic in the sense that their transition rules are not equivariant to translation, rotation, and reflection of the nodes' spatial locations. However, it is desirable for instances related by such transformations to be treated identically by the model. By replacing standard graph convolutions with E(n)-equivariant ones, we avoid anisotropy by design and propose a class of isotropic automata that we call E(n)-GNCAs. These models are lightweight, but can nevertheless handle large graphs, capture complex dynamics and exhibit emergent self-organising behaviours. We showcase the broad and successful applicability of E(n)-GNCAs on three different tasks: (i) pattern formation, (ii) graph auto-encoding, and (iii) simulation of E(n)-equivariant dynamical systems.