 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamics of Pedestrian Crossing Decisions Based on Vehicle Trajectories in Large-Scale Simulated and Real-World Data
Paper and Code
Apr 08, 2019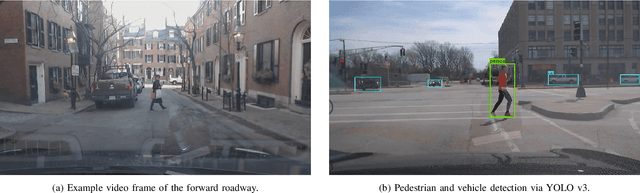
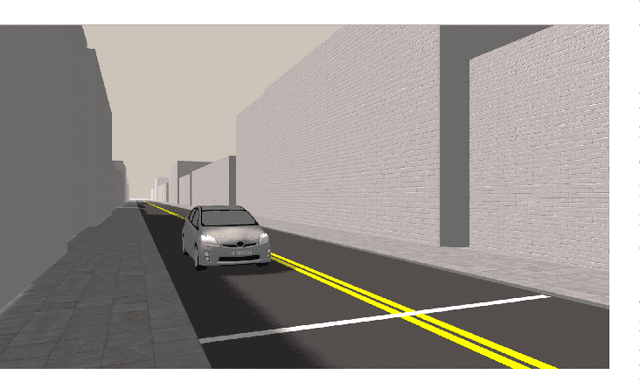
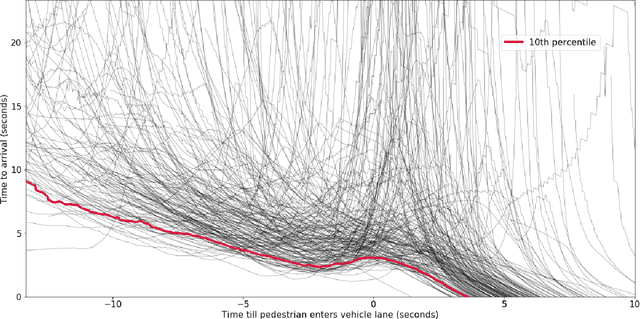
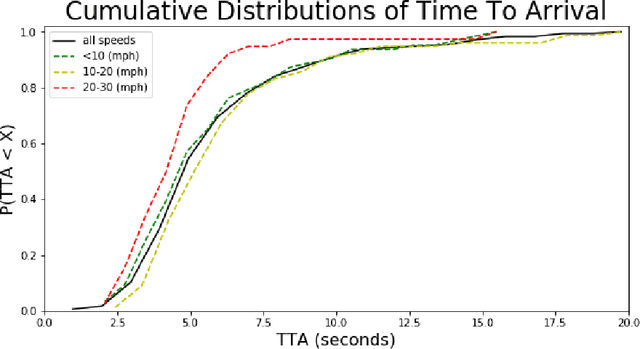
Humans, as both pedestrians and drivers, generally skillfully navigate traffic intersections. Despite the uncertainty, danger, and the non-verbal nature of communication commonly found in these interactions, there are surprisingly few collisions considering the total number of interactions. As the role of automation technology in vehicles grows, it becomes increasingly critical to understand the relationship between pedestrian and driver behavior: how pedestrians perceive the actions of a vehicle/driver and how pedestrians make crossing decisions. The relationship between time-to-arrival (TTA) and pedestrian gap acceptance (i.e., whether a pedestrian chooses to cross under a given window of time to cross) has been extensively investigated. However, the dynamic nature of vehicle trajectories in the context of non-verbal communication has not been systematically explored. Our work provides evidence that trajectory dynamics, such as changes in TTA, can be powerful signals in the non-verbal communication between drivers and pedestrians. Moreover, we investigate these effects in both simulated and real-world datasets, both larger than have previously been considered in literature to the best of our knowledge.