 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamically meeting performance objectives for multiple services on a service mesh
Paper and Code
Oct 08, 2022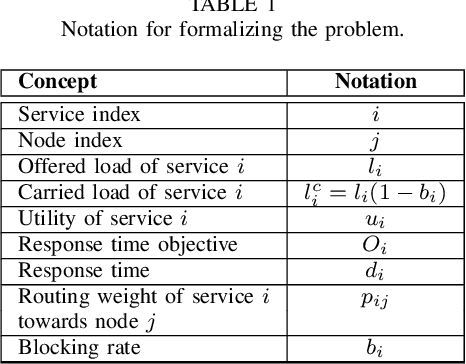
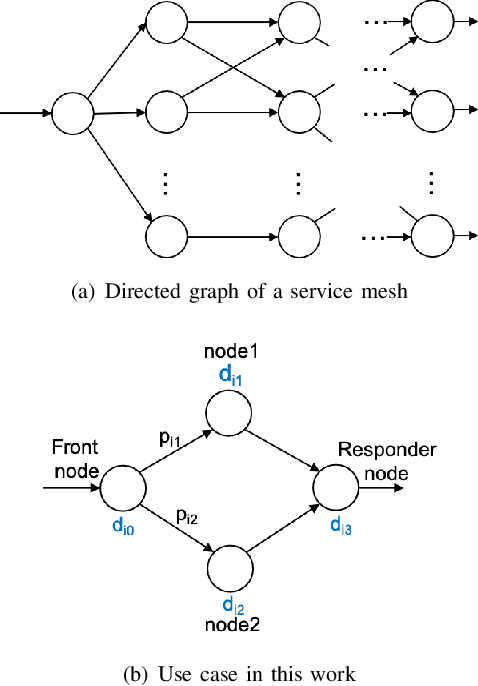
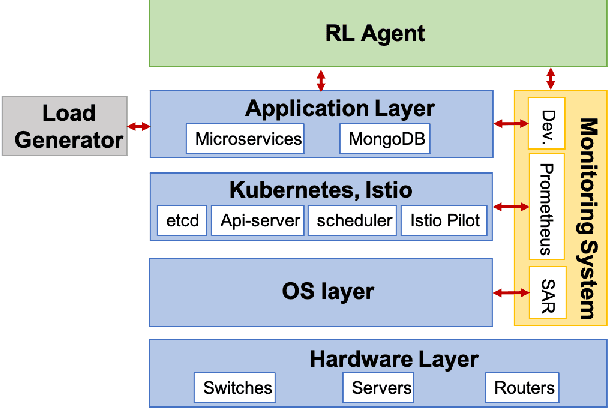
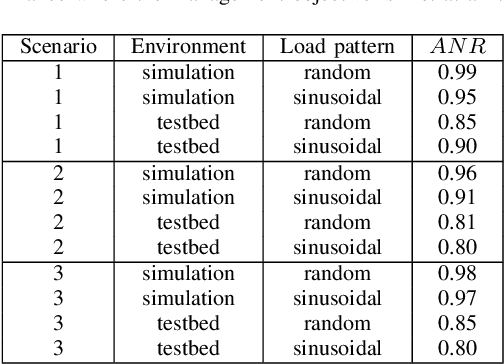
We present a framework that lets a service provider achieve end-to-end management objectives under varying load. Dynamic control actions are performed by a reinforcement learning (RL) agent. Our work includes experimentation and evaluation on a laboratory testbed where we have implemented basic information services on a service mesh supported by the Istio and Kubernetes platforms. We investigate different management objectives that include end-to-end delay bounds on service requests, throughput objectives, and service differentiation. These objectives are mapped onto reward functions that an RL agent learns to optimize, by executing control actions, namely, request routing and request blocking. We compute the control policies not on the testbed, but in a simulator, which speeds up the learning process by orders of magnitude. In our approach, the system model is learned on the testbed; it is then used to instantiate the simulator, which produces near-optimal control policies for various management objectives. The learned policies are then evaluated on the testbed using unseen load patterns.