 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic population-based meta-learning for multi-agent communication with natural language
Paper and Code
Oct 27, 2021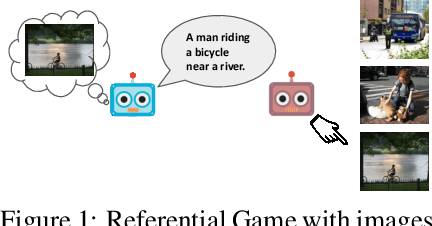



In this work, our goal is to train agents that can coordinate with seen, unseen as well as human partners in a multi-agent communication environment involving natural language. Previous work using a single set of agents has shown great progress in generalizing to known partners, however it struggles when coordinating with unfamiliar agents. To mitigate that, recent work explored the use of population-based approaches, where multiple agents interact with each other with the goal of learning more generic protocols. These methods, while able to result in good coordination between unseen partners, still only achieve so in cases of simple languages, thus failing to adapt to human partners using natural language. We attribute this to the use of static populations and instead propose a dynamic population-based meta-learning approach that builds such a population in an iterative manner. We perform a holistic evaluation of our method on two different referential games, and show that our agents outperform all prior work when communicating with seen partners and humans. Furthermore, we analyze the natural language generation skills of our agents, where we find that our agents also outperform strong baselines. Finally, we test the robustness of our agents when communicating with out-of-population agents and carefully test the importance of each component of our method through ablation studies.