 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Object Removal and Spatio-Temporal RGB-D Inpainting via Geometry-Aware Adversarial Learning
Paper and Code
Aug 12, 2020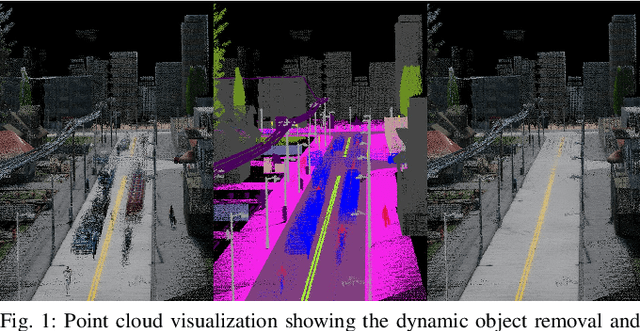
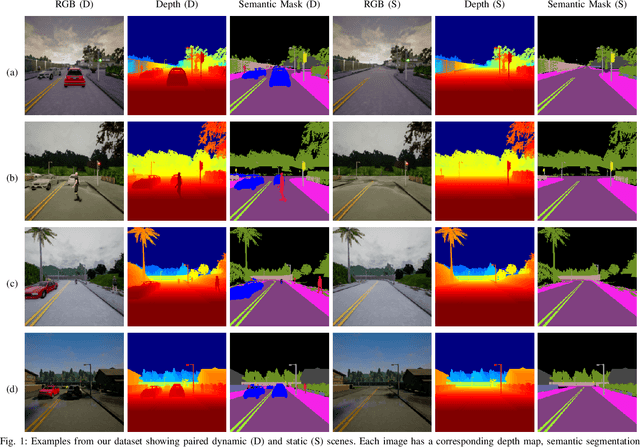
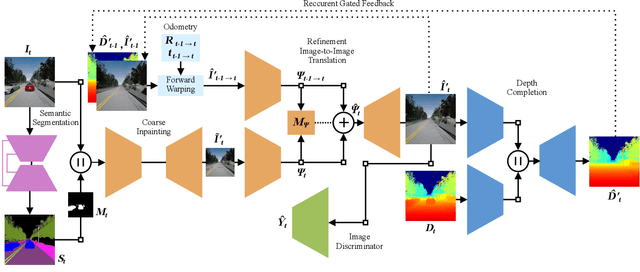
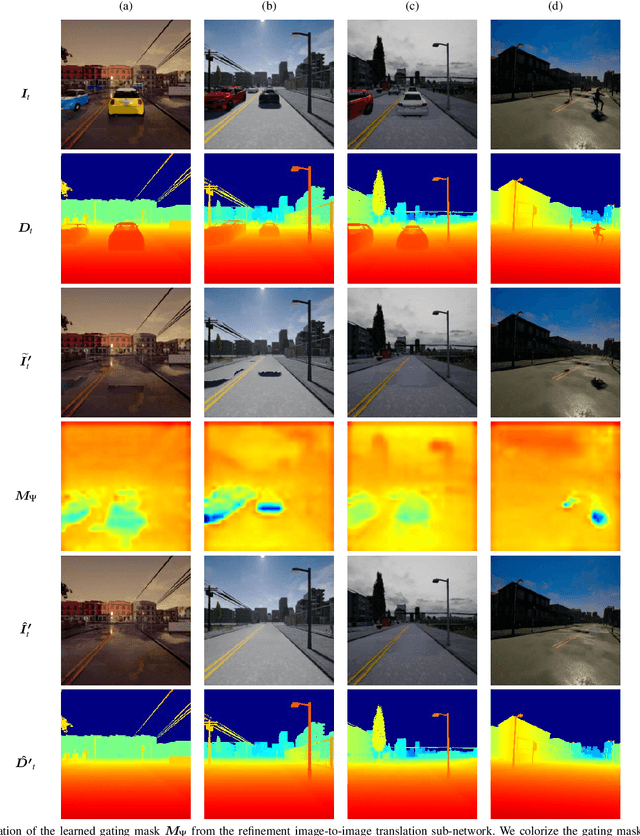
Dynamic objects have a significant impact on the robot's perception of the environment which degrades the performance of essential tasks such as localization and mapping. In this work, we address this problem by synthesizing plausible color, texture and geometry in regions occluded by dynamic objects. We propose the novel geometry-aware DynaFill architecture that follows a coarse-to-fine topology and incorporates our gated recurrent feedback mechanism to adaptively fuse information from previous timesteps. We optimize our architecture using adversarial training to synthesize fine realistic textures which enables it to hallucinate color and depth structure in occluded regions online in a spatially and temporally coherent manner, without relying on future frame information. Casting our inpainting problem as an image-to-image translation task, our model also corrects regions correlated with the presence of dynamic objects in the scene, such as shadows or reflections. We introduce a large-scale hyperrealistic dataset with RGB-D images, semantic segmentation labels, camera poses as well as ground truth RGB-D information of occluded regions. Extensive quantitative and qualitative evaluations show that our approach achieves state-of-the-art performance, even in challenging weather conditions. Furthermore, we present results for retrieval-based visual localization with the synthesized images that demonstrate the utility of our approach.