 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Multi-Person Mesh Recovery From Uncalibrated Multi-View Cameras
Paper and Code
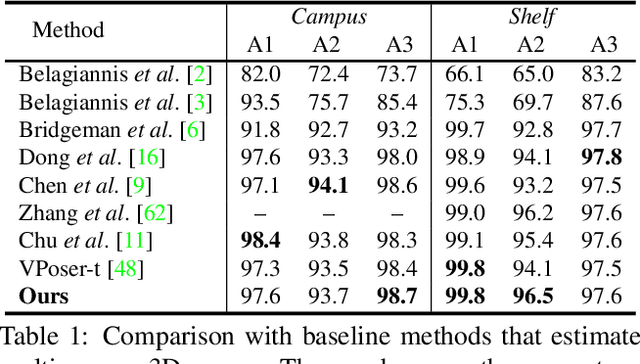
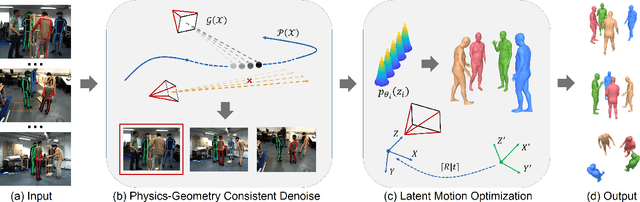
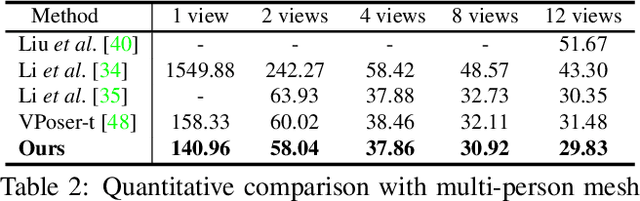
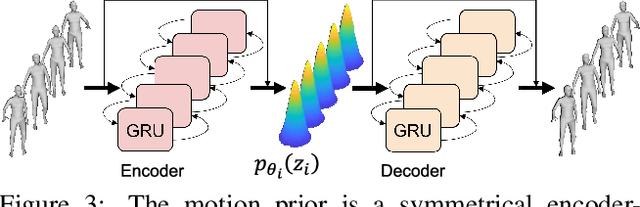
Dynamic multi-person mesh recovery has been a hot topic in 3D vision recently. However, few works focus on the multi-person motion capture from uncalibrated cameras, which mainly faces two challenges: the one is that inter-person interactions and occlusions introduce inherent ambiguities for both camera calibration and motion capture; The other is that a lack of dense correspondences can be used to constrain sparse camera geometries in a dynamic multi-person scene. Our key idea is incorporating motion prior knowledge into simultaneous optimization of extrinsic camera parameters and human meshes from noisy human semantics. First, we introduce a physics-geometry consistency to reduce the low and high frequency noises of the detected human semantics. Then a novel latent motion prior is proposed to simultaneously optimize extrinsic camera parameters and coherent human motions from slightly noisy inputs. Experimental results show that accurate camera parameters and human motions can be obtained through one-stage optimization. The codes will be publicly available at~\url{https://www.yangangwang.com}.