 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic-Dark SLAM: RGB-Thermal Cooperative Robot Vision Strategy for Multi-Person Tracking in Both Well-Lit and Low-Light Scenes
Paper and Code
Mar 17, 2025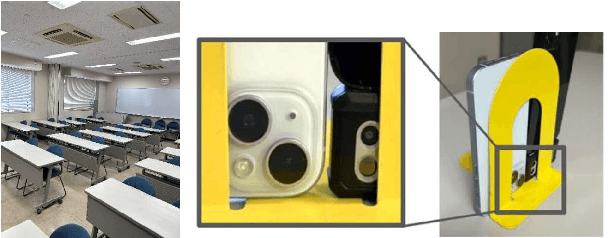
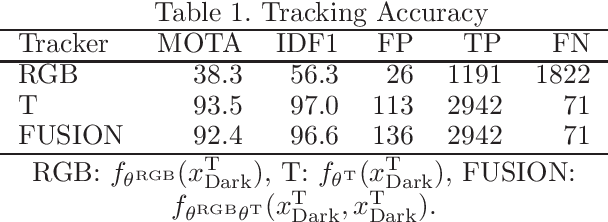
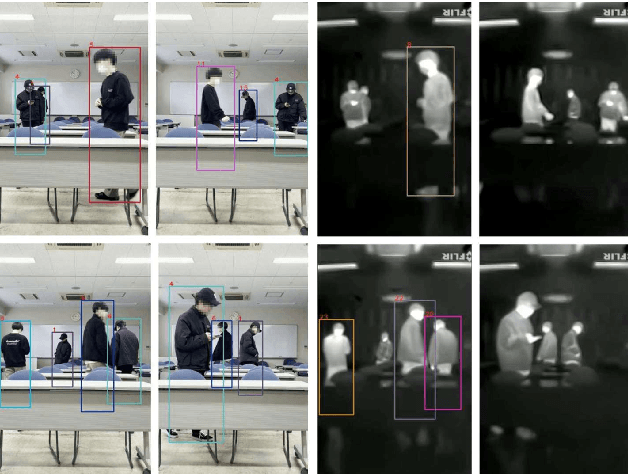
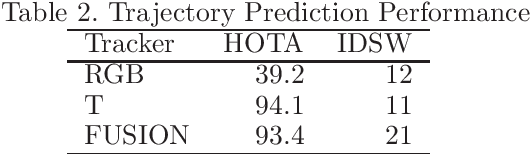
In robot vision, thermal cameras have significant potential for recognizing humans even in complete darkness. However, their application to multi-person tracking (MPT) has lagged due to data scarcity and difficulties in individual identification. In this study, we propose a cooperative MPT system that utilizes co-located RGB and thermal cameras, using pseudo-annotations (bounding boxes + person IDs) to train RGB and T trackers. Evaluation experiments demonstrate that the T tracker achieves remarkable performance in both bright and dark scenes. Furthermore, results suggest that a tracker-switching approach using a binary brightness classifier is more suitable than a tracker-fusion approach for information integration. This study marks a crucial first step toward ``Dynamic-Dark SLAM," enabling effective recognition, understanding, and reconstruction of individuals, occluding objects, and traversable areas in dynamic environments, both bright and dark.