 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDULA and DEBA: Differentiable Ergonomic Risk Models for Postural Assessment and Optimization in Ergonomically Intelligent pHRI
Paper and Code
May 06, 2022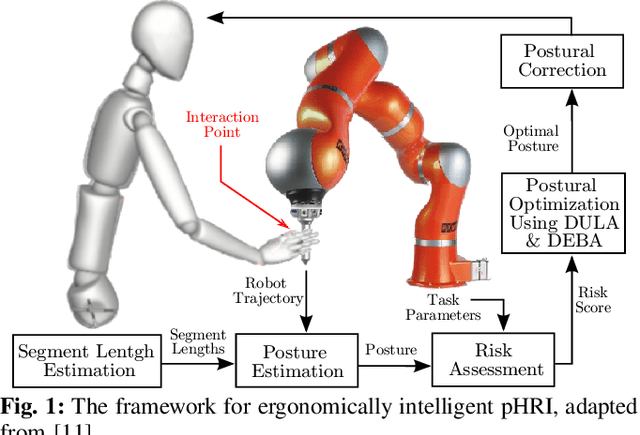
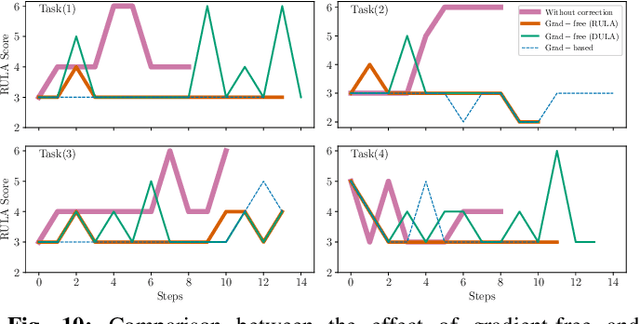
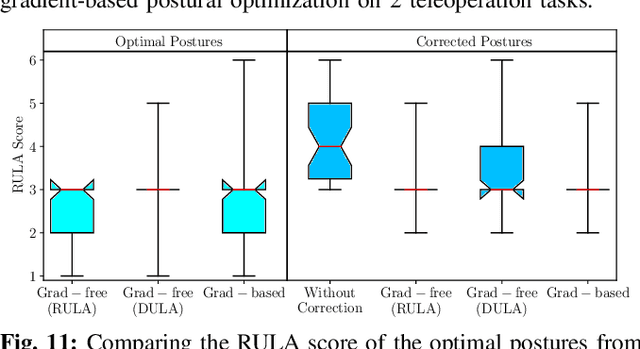
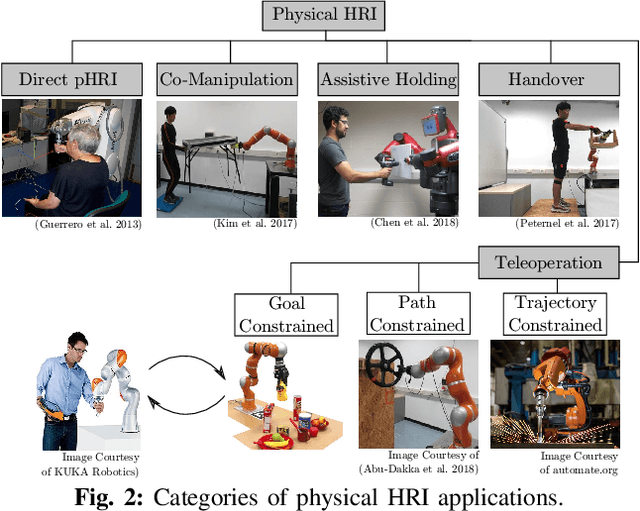
Ergonomics and human comfort are essential concerns in physical human-robot interaction applications. Defining an accurate and easy-to-use ergonomic assessment model stands as an important step in providing feedback for postural correction to improve operator health and comfort. Common practical methods in the area suffer from inaccurate ergonomics models in performing postural optimization. In order to retain assessment quality, while improving computational considerations, we propose a novel framework for postural assessment and optimization for ergonomically intelligent physical human-robot interaction. We introduce DULA and DEBA, differentiable and continuous ergonomics models learned to replicate the popular and scientifically validated RULA and REBA assessments with more than 99% accuracy. We show that DULA and DEBA provide assessment comparable to RULA and REBA while providing computational benefits when being used in postural optimization. We evaluate our framework through human and simulation experiments. We highlight DULA and DEBA's strength in a demonstration of postural optimization for a simulated pHRI task.