 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual Geometric Graph Network (DG2N) -- Zero-Shot Refinement for Dense Shape Correspondence
Paper and Code
Nov 30, 2020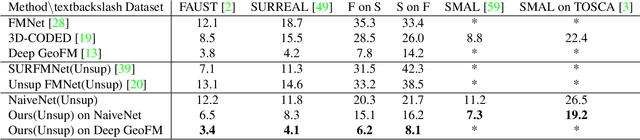
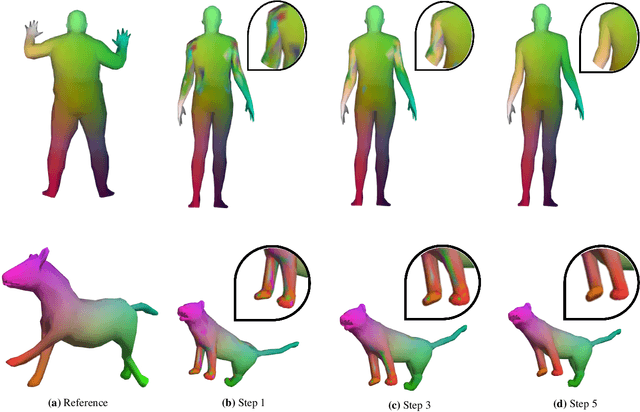
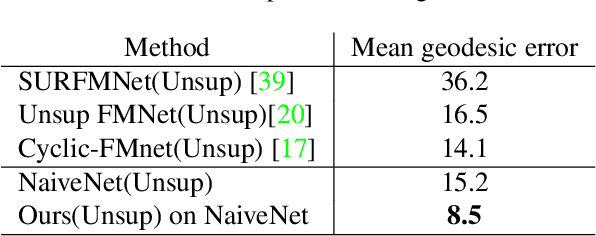
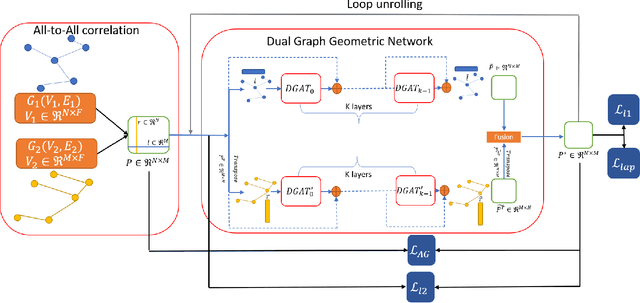
We provide a novel new approach for aligning geometric models using a dual graph structure where local features are mapping probabilities. Alignment of non-rigid structures is one of the most challenging computer vision tasks due to the high number of unknowns needed to model the correspondence. We have seen a leap forward using DNN models in template alignment and functional maps, but those methods fail for inter-class alignment where nonisometric deformations exist. Here we propose to rethink this task and use unrolling concepts on a dual graph structure - one for a forward map and one for a backward map, where the features are pulled back matching probabilities from the target into the source. We report state of the art results on stretchable domains alignment in a rapid and stable solution for meshes and cloud of points.