 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriving Style Representation in Convolutional Recurrent Neural Network Model of Driver Identification
Paper and Code
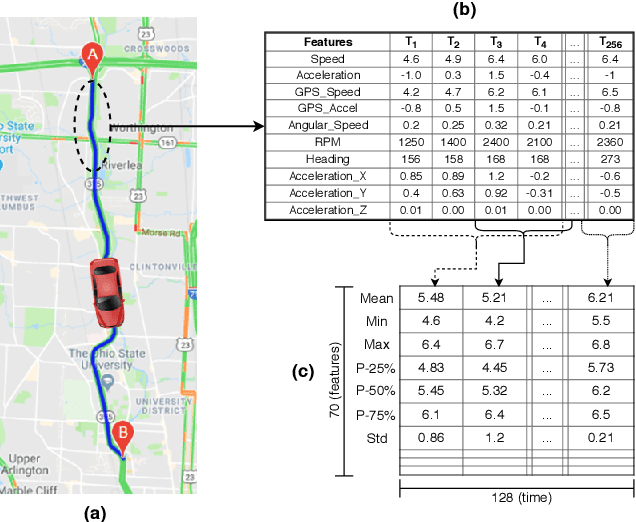
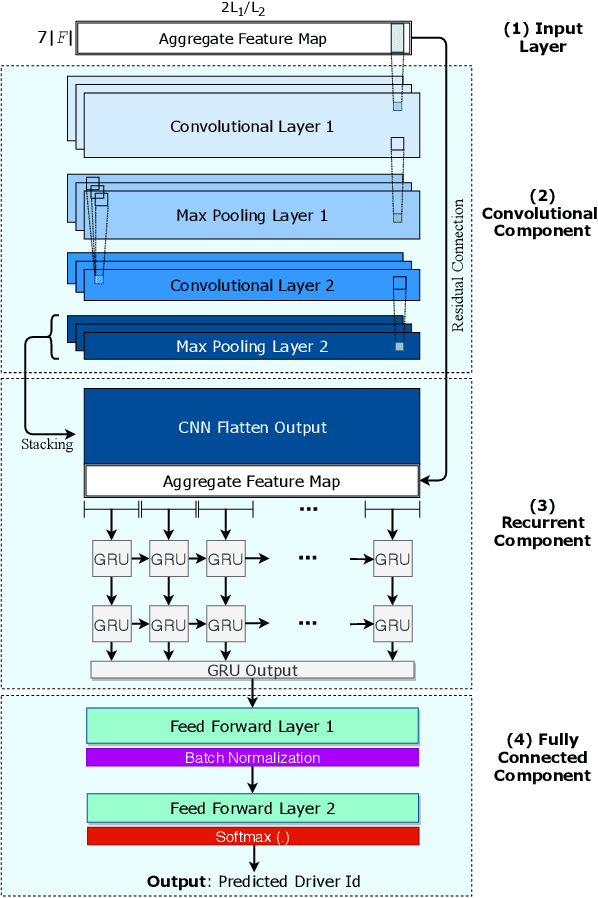
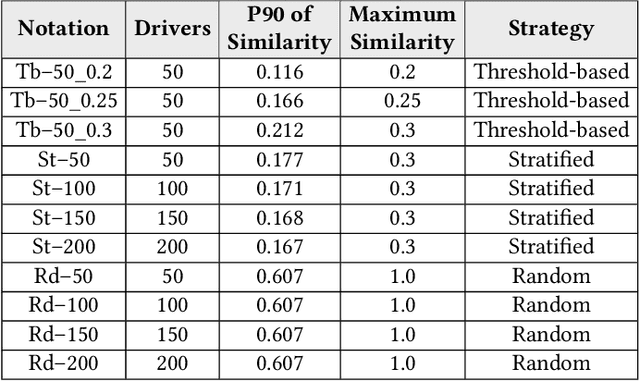
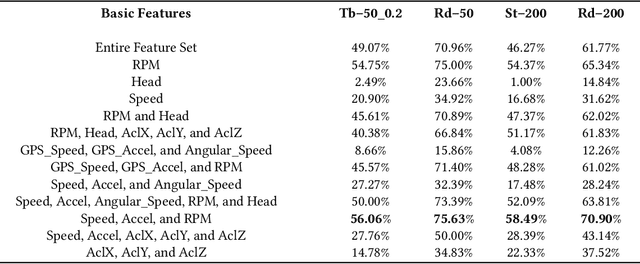
Identifying driving styles is the task of analyzing the behavior of drivers in order to capture variations that will serve to discriminate different drivers from each other. This task has become a prerequisite for a variety of applications, including usage-based insurance, driver coaching, driver action prediction, and even in designing autonomous vehicles; because driving style encodes essential information needed by these applications. In this paper, we present a deep-neural-network architecture, we term D-CRNN, for building high-fidelity representations for driving style, that combine the power of convolutional neural networks (CNN) and recurrent neural networks (RNN). Using CNN, we capture semantic patterns of driver behavior from trajectories (such as a turn or a braking event). We then find temporal dependencies between these semantic patterns using RNN to encode driving style. We demonstrate the effectiveness of these techniques for driver identification by learning driving style through extensive experiments conducted on several large, real-world datasets, and comparing the results with the state-of-the-art deep-learning and non-deep-learning solutions. These experiments also demonstrate a useful example of bias removal, by presenting how we preprocess the input data by sampling dissimilar trajectories for each driver to prevent spatial memorization. Finally, this paper presents an analysis of the contribution of different attributes for driver identification; we find that engine RPM, Speed, and Acceleration are the best combination of features.