 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't Forget The Past: Recurrent Depth Estimation from Monocular Video
Paper and Code
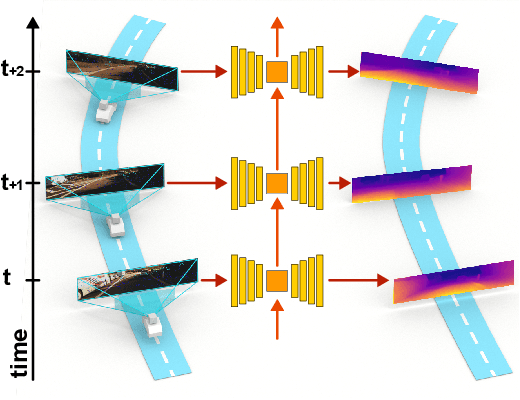
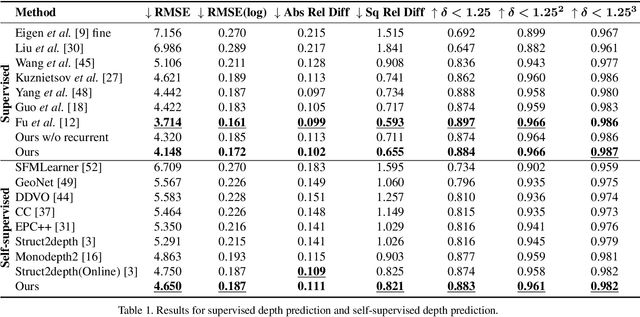
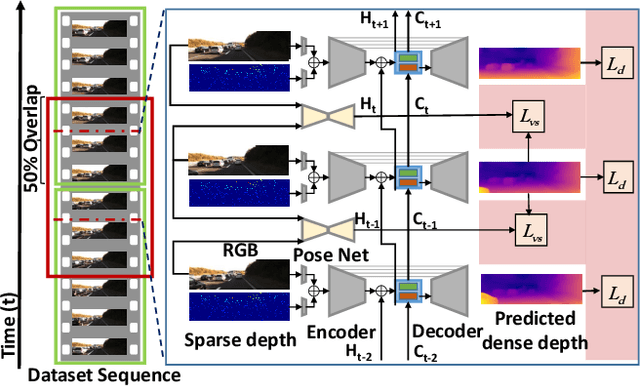
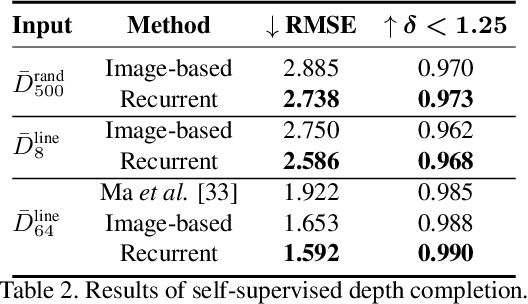
Autonomous cars need continuously updated depth information. Thus far, the depth is mostly estimated independently for a single frame at a time, even if the method starts from video input. Our method produces a time series of depth maps, which makes it an ideal candidate for online learning approaches. In particular, we put three different types of depth estimation (supervised depth prediction, self-supervised depth prediction, and self-supervised depth completion) into a common framework. We integrate the corresponding networks with a convolutional LSTM such that the spatiotemporal structures of depth across frames can be exploited to yield a more accurate depth estimation. Our method is flexible. It can be applied to monocular videos only or be combined with different types of sparse depth patterns. We carefully study the architecture of the recurrent network and its training strategy. We are first to successfully exploit recurrent networks for real-time self-supervised monocular depth estimation and completion. Extensive experiments show that our recurrent method outperforms its image-based counterpart consistently and significantly in both self-supervised scenarios. It also outperforms previous depth estimation methods of the three popular groups.