Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDOFS: A Real-world 3D Deformable Object Dataset with Full Spatial Information for Dynamics Model Learning
Paper and Code
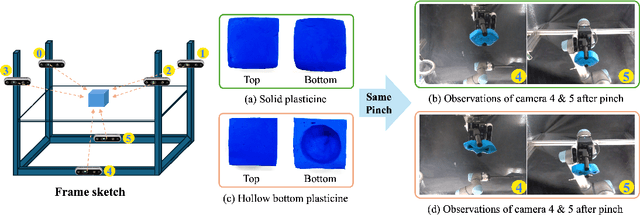
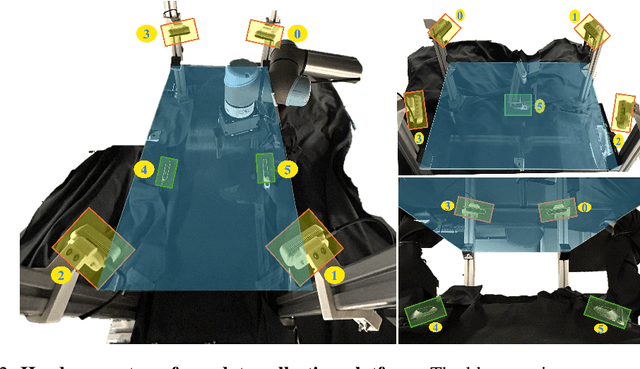
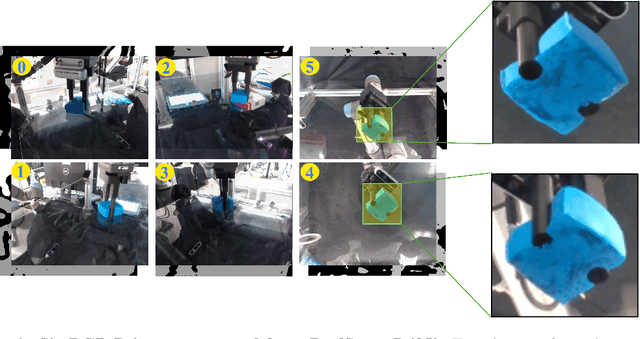
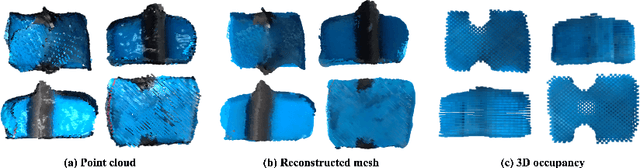
This work proposes DOFS, a pilot dataset of 3D deformable objects (DOs) (e.g., elasto-plastic objects) with full spatial information (i.e., top, side, and bottom information) using a novel and low-cost data collection platform with a transparent operating plane. The dataset consists of active manipulation action, multi-view RGB-D images, well-registered point clouds, 3D deformed mesh, and 3D occupancy with semantics, using a pinching strategy with a two-parallel-finger gripper. In addition, we trained a neural network with the down-sampled 3D occupancy and action as input to model the dynamics of an elasto-plastic object. Our dataset and all CADs of the data collection system will be released soon on our website.
* 5 pages, 6 figures, 2024 CoRL Workshop on Learning Robot Fine and
Dexterous Manipulation: Perception and Control
View paper on