 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDMP++: Overcoming Some Drawbacks of Dynamic Movement Primitives
Paper and Code
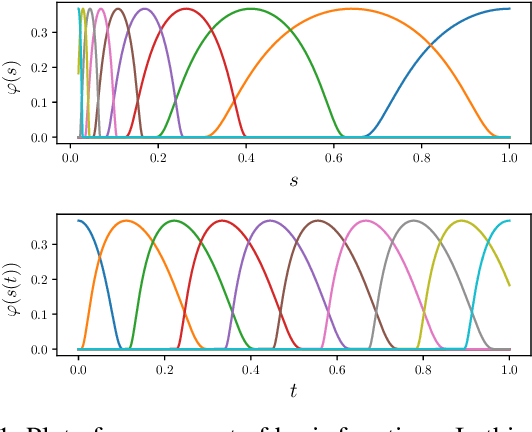
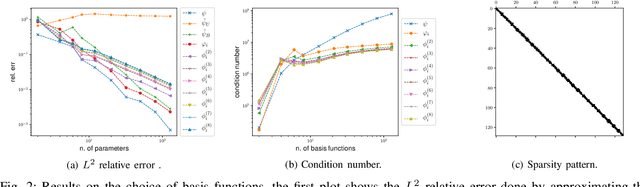
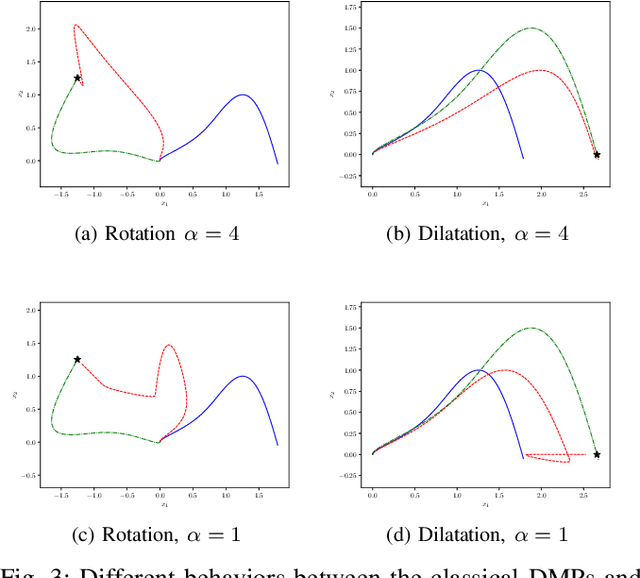
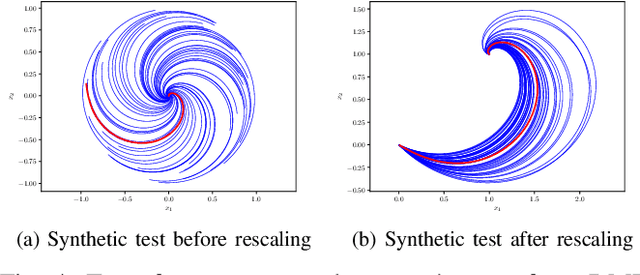
Dynamic Movement Primitives (DMPs) is a framework for learning a point-to-point trajectory from a demonstration. Despite being widely used, DMPs still present some shortcomings that may limit their usage in real robotic applications. Firstly, adaptation of the trajectory generated by the DMP heavily depends on the choice of hyperparameters and on the new desired goal position. Secondly, DMPs are a framework for `one-shot learning', meaning that they are limited to learn from a unique demonstration. In this work, we propose a technique to make the generalization of the trajectory robust against the choice of hyperparameters and new goal positions. Moreover, we also propose a strategy to extract a common behavior from multiple observations. We also present a new set of basis functions to be used in the learning process.