 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDMMGAN: Diverse Multi Motion Prediction of 3D Human Joints using Attention-Based Generative Adverserial Network
Paper and Code
Sep 13, 2022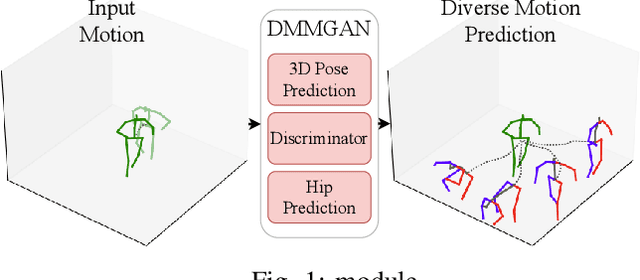
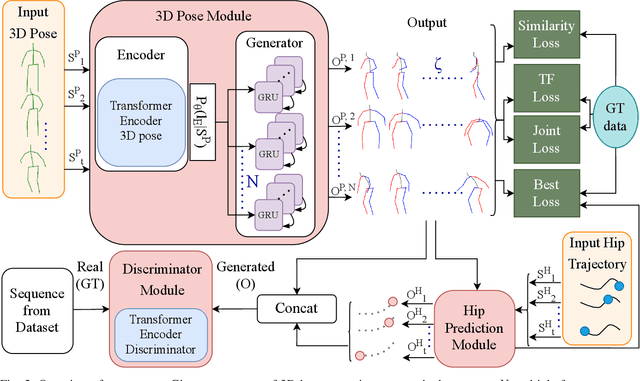
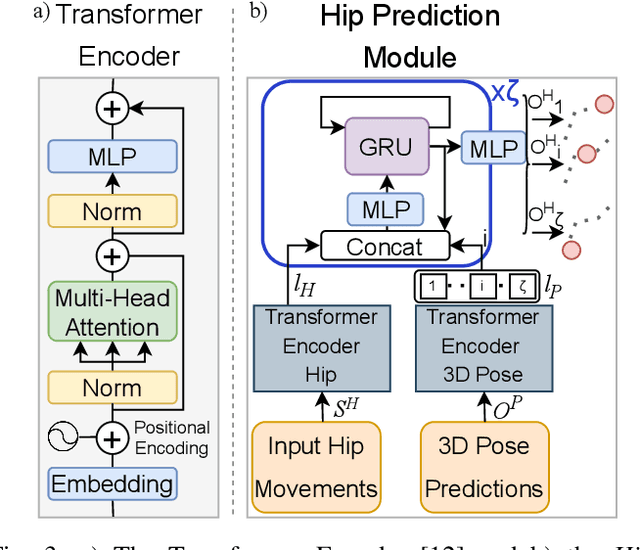
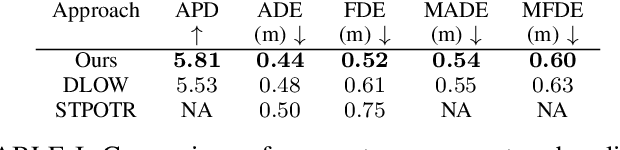
Human motion prediction is a fundamental part of many human-robot applications. Despite the recent progress in human motion prediction, most studies simplify the problem by predicting the human motion relative to a fixed joint and/or only limit their model to predict one possible future motion. While due to the complex nature of human motion, a single output cannot reflect all the possible actions one can do. Also, for any robotics application, we need the full human motion including the user trajectory not a 3d pose relative to the hip joint. In this paper, we try to address these two issues by proposing a transformer-based generative model for forecasting multiple diverse human motions. Our model generates \textit{N} future possible motion by querying a history of human motion. Our model first predicts the pose of the body relative to the hip joint. Then the \textit{Hip Prediction Module} predicts the trajectory of the hip movement for each predicted pose frame. To emphasize on the diverse future motions we introduce a similarity loss that penalizes the pairwise sample distance. We show that our system outperforms the state-of-the-art in human motion prediction while it can predict diverse multi-motion future trajectories with hip movements