Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Simultaneous Action and Target Assignment for Multi-Robot Multi-Target Tracking
Paper and Code
Nov 06, 2018
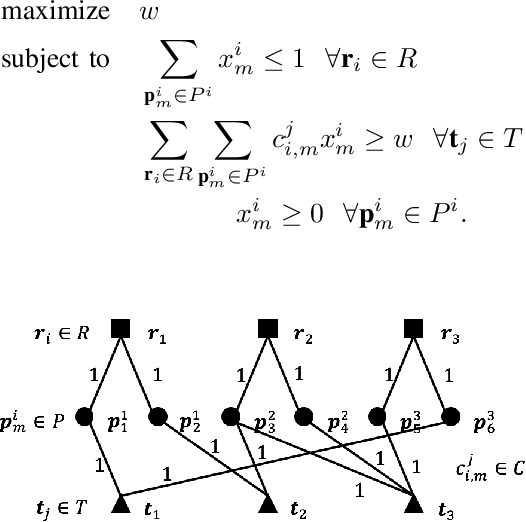

We study a multi-robot assignment problem for multi-target tracking. The proposed problem can be viewed as the mixed packing and covering problem. To deal with a limitation on both sensing and communication ranges, a distributed approach is taken into consideration. A local algorithm gives theoretical bounds on both the running time and approximation ratio to an optimal solution. We employ a local algorithm of max-min linear programs to solve the proposed task. Simulation result shows that a local algorithm is an effective solution to the multi-robot task allocation.
* 6 pages, 9 figures, Published in IEEE International Conference on
Robotics and Automation (ICRA), 2018
View paper on