 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Multi-Target Tracking in Camera Networks
Paper and Code
Oct 26, 2020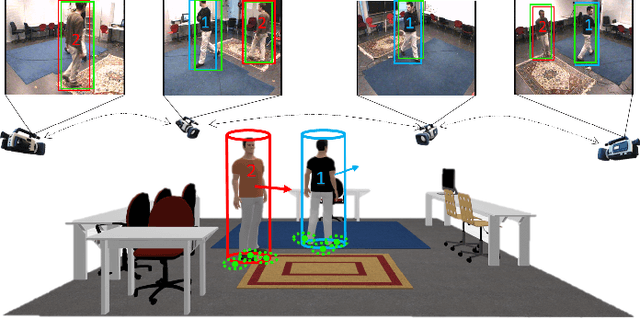
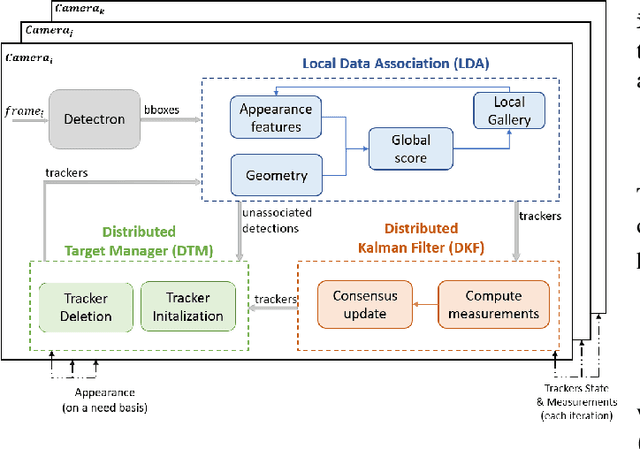

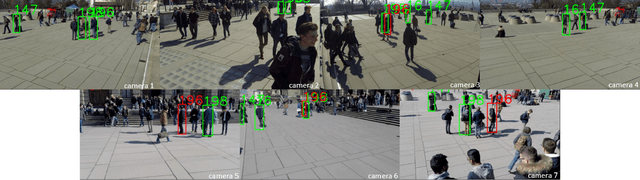
Most recent works on multi-target tracking with multiple cameras focus on centralized systems. In contrast, this paper presents a multi-target tracking approach implemented in a distributed camera network. The advantages of distributed systems lie in lighter communication management, greater robustness to failures and local decision making. On the other hand, data association and information fusion are more challenging than in a centralized setup, mostly due to the lack of global and complete information. The proposed algorithm boosts the benefits of the Distributed-Consensus Kalman Filter with the support of a re-identification network and a distributed tracker manager module to facilitate consistent information. These techniques complement each other and facilitate the cross-camera data association in a simple and effective manner. We evaluate the whole system with known public data sets under different conditions demonstrating the advantages of combining all the modules. In addition, we compare our algorithm to some existing centralized tracking methods, outperforming their behavior in terms of accuracy and bandwidth usage.