 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Mission Planning of Complex Tasks for Heterogeneous Multi-Robot Teams
Paper and Code
Sep 21, 2021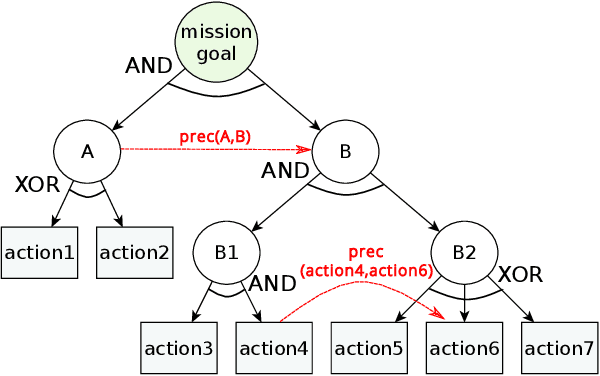
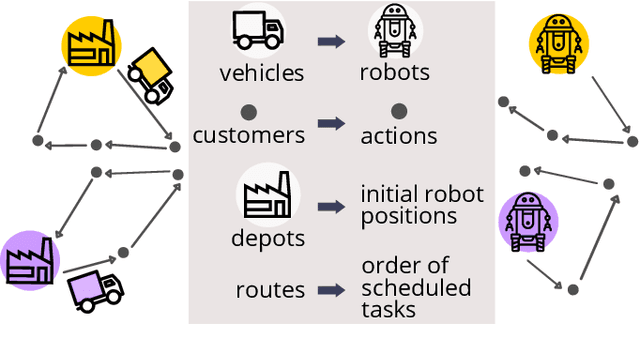
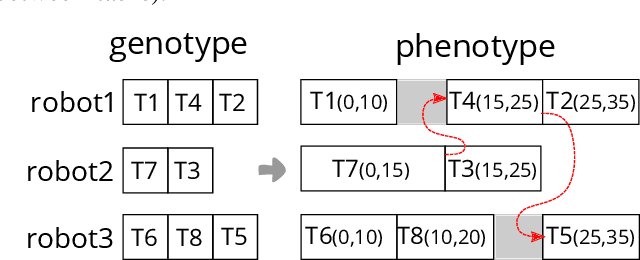
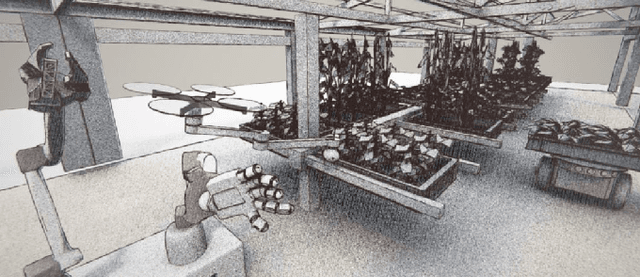
In this paper, we propose a distributed multi-stage optimization method for planning complex missions for heterogeneous multi-robot teams. This class of problems involves tasks that can be executed in different ways and are associated with cross-schedule dependencies that constrain the schedules of the different robots in the system. The proposed approach involves a multi-objective heuristic search of the mission, represented as a hierarchical tree that defines the mission goal. This procedure outputs several favorable ways to fulfill the mission, which directly feed into the next stage of the method. We propose a distributed metaheuristic based on evolutionary computation to allocate tasks and generate schedules for the set of chosen decompositions. The method is evaluated in a simulation setup of an automated greenhouse use case, where we demonstrate the method's ability to adapt the planning strategy depending on the available robots and the given optimization criteria.