Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistant Vehicle Detection Using Radar and Vision
Paper and Code
Jan 30, 2019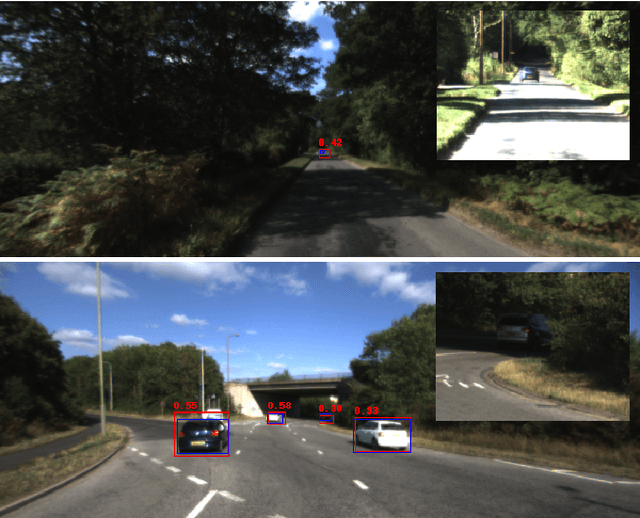
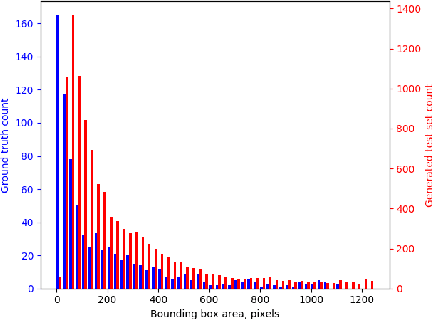
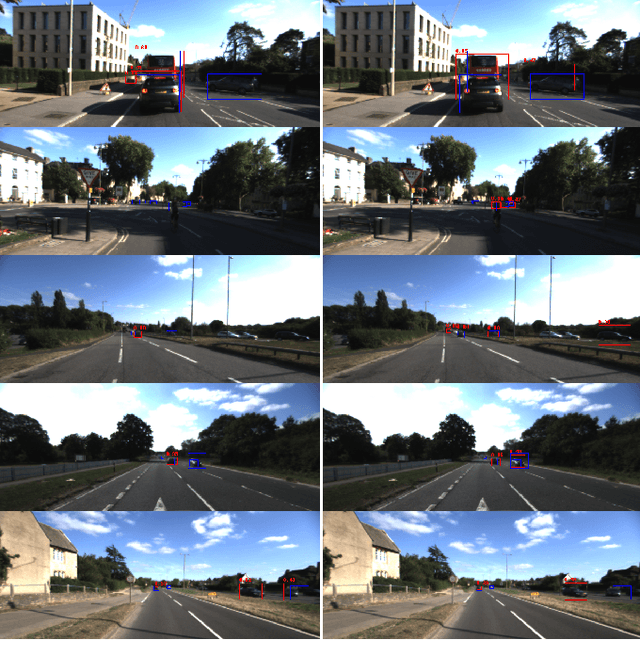
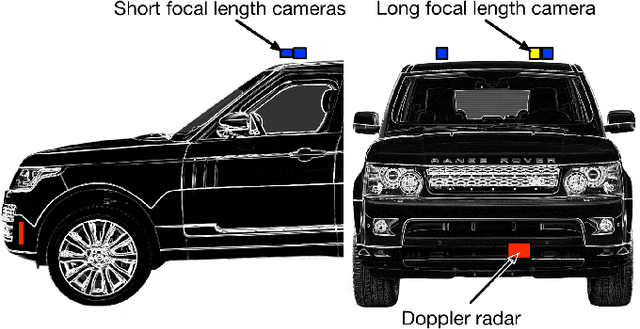
For autonomous vehicles to be able to operate successfully they need to be aware of other vehicles with sufficient time to make safe, stable plans. Given the possible closing speeds between two vehicles, this necessitates the ability to accurately detect distant vehicles. Many current image-based object detectors using convolutional neural networks exhibit excellent performance on existing datasets such as KITTI. However, the performance of these networks falls when detecting small (distant) objects. We demonstrate that incorporating radar data can boost performance in these difficult situations. We also introduce an efficient automated method for training data generation using cameras of different focal lengths.
View paper on