 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscriminator Soft Actor Critic without Extrinsic Rewards
Paper and Code
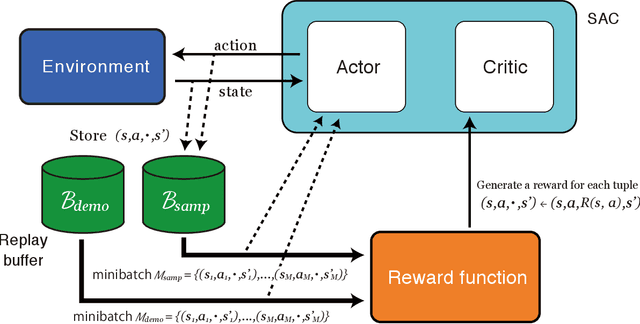
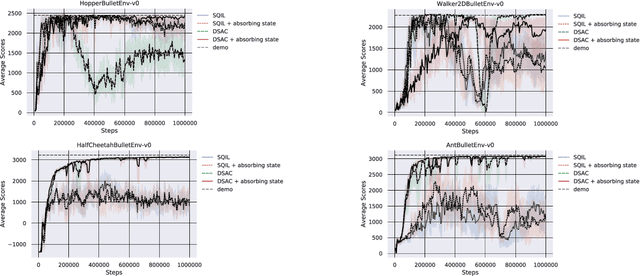
It is difficult to be able to imitate well in unknown states from a small amount of expert data and sampling data. Supervised learning methods such as Behavioral Cloning do not require sampling data, but usually suffer from distribution shift. The methods based on reinforcement learning, such as inverse reinforcement learning and generative adversarial imitation learning (GAIL), can learn from only a few expert data. However, they often need to interact with the environment. Soft Q imitation learning addressed the problems, and it was shown that it could learn efficiently by combining Behavioral Cloning and soft Q-learning with constant rewards. In order to make this algorithm more robust to distribution shift, we propose Discriminator Soft Actor Critic (DSAC). It uses a reward function based on adversarial inverse reinforcement learning instead of constant rewards. We evaluated it on PyBullet environments with only four expert trajectories.