 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete-time Contraction-based Control of Nonlinear Systems with Parametric Uncertainties using Neural Networks
Paper and Code
May 12, 2021


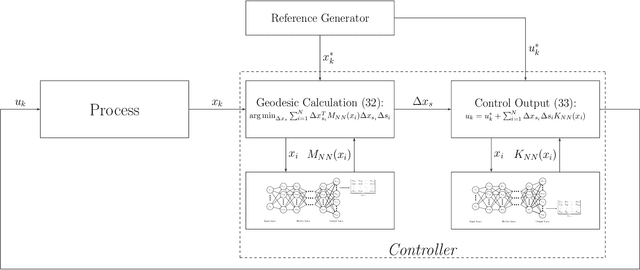
Flexible manufacturing in the process industry requires control systems to achieve time-varying setpoints (e.g., product specifications) based on market demand. Contraction theory provides a useful framework for reference-independent system analysis and tracking control for nonlinear systems. However, determination of the control contraction metrics and control laws can be very difficult for general nonlinear systems. This work develops an approach to discrete-time contraction analysis and control using neural networks. The methodology involves training a neural network to learn a contraction metric and feedback gain. The resulting contraction-based controller embeds the trained neural network and is capable of achieving efficient tracking of time-varying references, with a full range of model uncertainty, without the need for controller structure redesign. This is a robust approach that can deal with bounded parametric uncertainties in the process model, which are commonly encountered in industrial (chemical) processes. Simulation examples are provided to illustrate the above approach.