 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete fully probabilistic design: a tool to design control policies from examples
Paper and Code
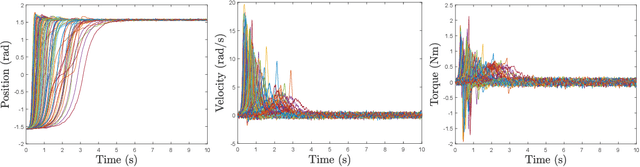
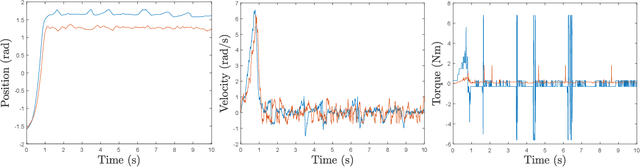
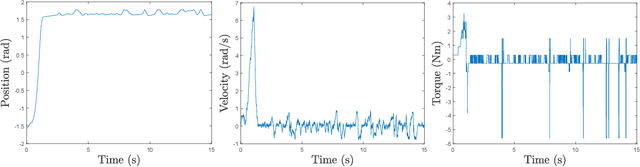
We present a discretized design that expounds an algorithm recently introduced in Gagliardi and Russo (2021) to synthesize control policies from examples for constrained, possibly stochastic and nonlinear, systems. The constraints do not need to be fulfilled in the possibly noisy example data, which in turn might be collected from a system that is different from the one under control. For this discretized design, we discuss a number of properties and give a design pipeline. The design, which we term as discrete fully probabilistic design, is benchmarked numerically on an example that involves controlling an inverted pendulum with actuation constraints starting from data collected from a physically different pendulum that does not satisfy the system-specific actuation constraints.