 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete and Continuous Action Representation for Practical RL in Video Games
Paper and Code
Dec 23, 2019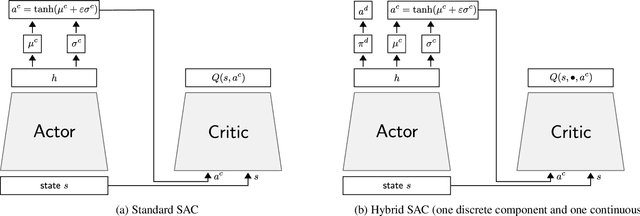
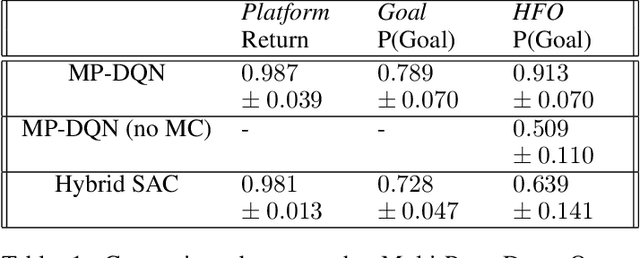
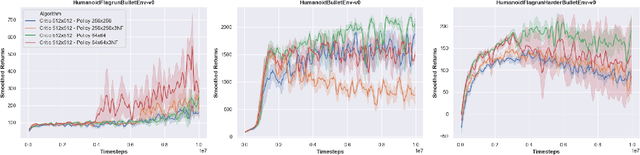
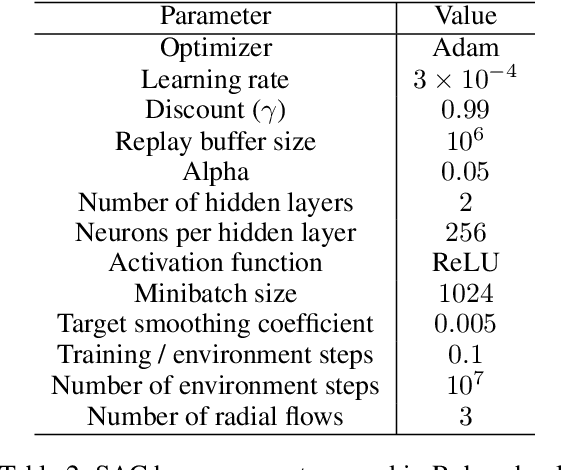
While most current research in Reinforcement Learning (RL) focuses on improving the performance of the algorithms in controlled environments, the use of RL under constraints like those met in the video game industry is rarely studied. Operating under such constraints, we propose Hybrid SAC, an extension of the Soft Actor-Critic algorithm able to handle discrete, continuous and parameterized actions in a principled way. We show that Hybrid SAC can successfully solve a highspeed driving task in one of our games, and is competitive with the state-of-the-art on parameterized actions benchmark tasks. We also explore the impact of using normalizing flows to enrich the expressiveness of the policy at minimal computational cost, and identify a potential undesired effect of SAC when used with normalizing flows, that may be addressed by optimizing a different objective.