 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Synergies for Robot Manipulation with Multi-Task Reinforcement Learning
Paper and Code
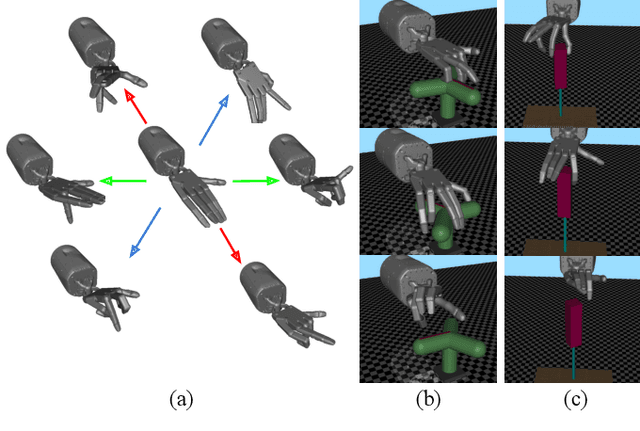
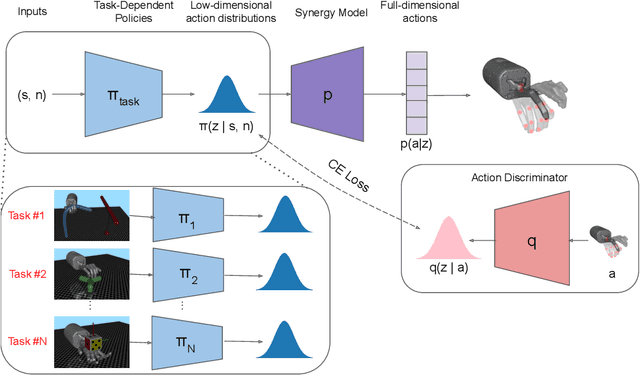
Controlling robotic manipulators with high-dimensional action spaces for dexterous tasks is a challenging problem. Inspired by human manipulation, researchers have studied generating and using postural synergies for robot hands to accomplish manipulation tasks, leveraging the lower dimensional nature of synergistic action spaces. However, many of these works require pre-collected data from an existing controller in order to derive such a subspace by means of dimensionality reduction. In this paper, we present a framework that simultaneously discovers a synergy space and a multi-task policy that operates on this low-dimensional action space to accomplish diverse manipulation tasks. We demonstrate that our end-to-end method is able to perform multiple tasks using few synergies, and outperforms sequential methods that apply dimensionality reduction to independently collected data. We also show that deriving synergies using multiple tasks can lead to a subspace that enables robots to efficiently learn new manipulation tasks and interactions with new objects.