 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-Driven Inertial Generated Data for Smartphone Location Classification
Paper and Code
Apr 20, 2025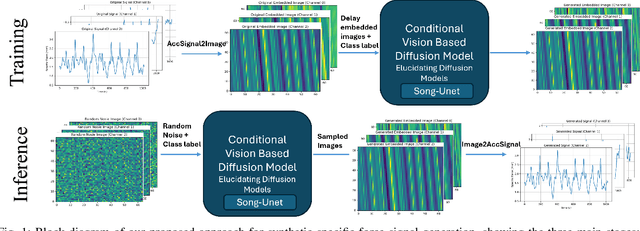
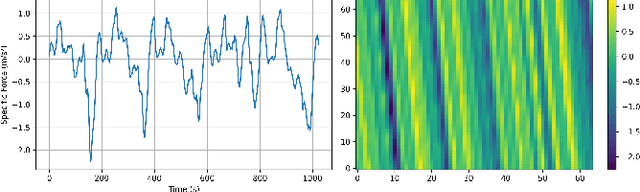
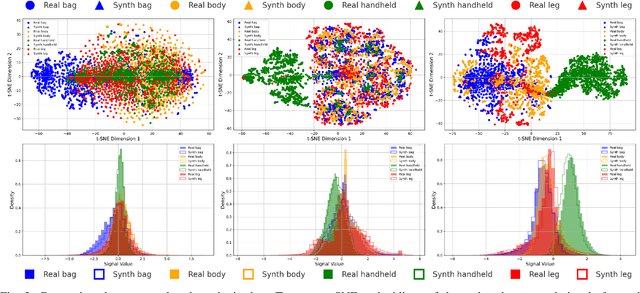

Despite the crucial role of inertial measurements in motion tracking and navigation systems, the time-consuming and resource-intensive nature of collecting extensive inertial data has hindered the development of robust machine learning models in this field. In recent years, diffusion models have emerged as a revolutionary class of generative models, reshaping the landscape of artificial data generation. These models surpass generative adversarial networks and other state-of-the-art approaches to complex tasks. In this work, we propose diffusion-driven specific force-generated data for smartphone location recognition. We provide a comprehensive evaluation methodology by comparing synthetic and real recorded specific force data across multiple metrics. Our results demonstrate that our diffusion-based generative model successfully captures the distinctive characteristics of specific force signals across different smartphone placement conditions. Thus, by creating diverse, realistic synthetic data, we can reduce the burden of extensive data collection while providing high-quality training data for machine learning models.