Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDialogue Policies for Confusion Mitigation in Situated HRI
Paper and Code
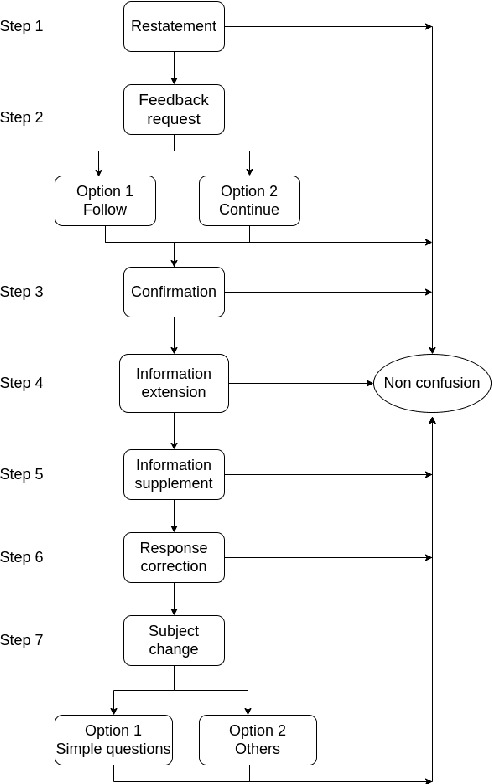
Confusion is a mental state triggered by cognitive disequilibrium that can occur in many types of task-oriented interaction, including Human-Robot Interaction (HRI). People may become confused while interacting with robots due to communicative or even task-centred challenges. To build a smooth and engaging HRI, it is insufficient for an agent to simply detect confusion; instead, the system should aim to mitigate the situation. In light of this, in this paper, we present our approach to a linguistic design of dialogue policies to build a dialogue framework to alleviate interlocutor confusion. We also outline our sketch and discuss challenges with respect to its operationalisation.
* 2pages, 1figure, 1 page literture, Semdial2022 Conference
(https://semdial2022.github.io/?page=program#)
View paper on