 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexDLO: Learning Goal-Conditioned Dexterous Policy for Dynamic Manipulation of Deformable Linear Objects
Paper and Code
Dec 23, 2023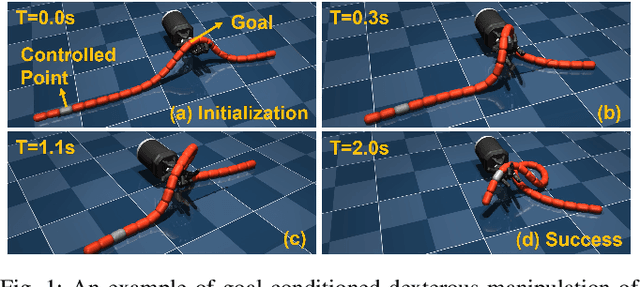



Deformable linear object (DLO) manipulation is needed in many fields. Previous research on deformable linear object (DLO) manipulation has primarily involved parallel jaw gripper manipulation with fixed grasping positions. However, the potential for dexterous manipulation of DLOs using an anthropomorphic hand is under-explored. We present DexDLO, a model-free framework that learns dexterous dynamic manipulation policies for deformable linear objects with a fixed-base dexterous hand in an end-to-end way. By abstracting several common DLO manipulation tasks into goal-conditioned tasks, our DexDLO can perform these tasks, such as DLO grabbing, DLO pulling, DLO end-tip position controlling, etc. Using the Mujoco physics simulator, we demonstrate that our framework can efficiently and effectively learn five different DLO manipulation tasks with the same framework parameters. We further provide a thorough analysis of learned policies, reward functions, and reduced observations for a comprehensive understanding of the framework.