 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment and Testing of a Vine Robot for Urban Search and Rescue in Confined Rubble Environments
Paper and Code
Sep 16, 2024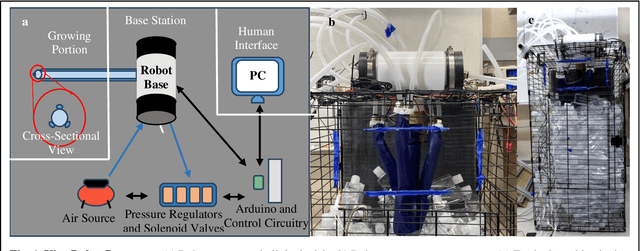
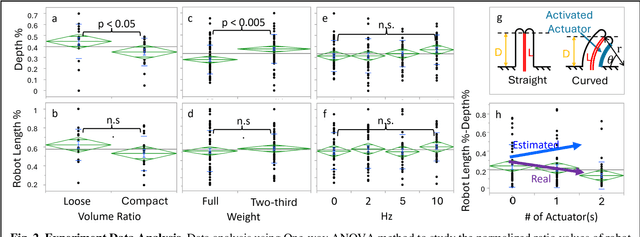
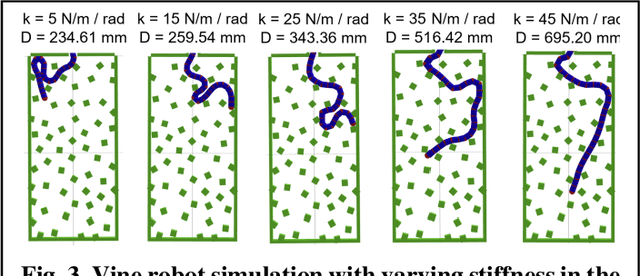
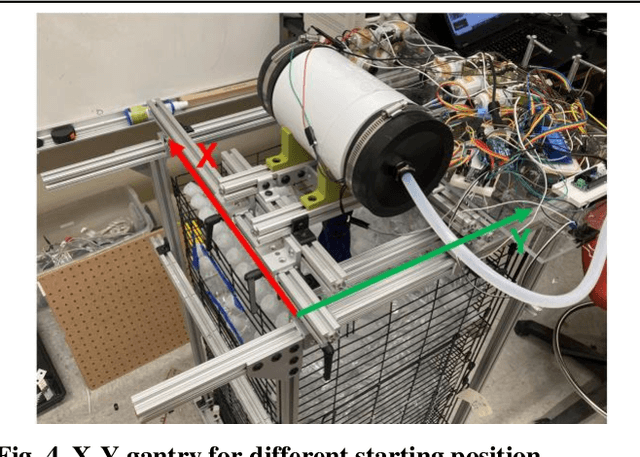
The request for fast response and safe operation after natural and man-made disasters in urban environments has spurred the development of robotic systems designed to assist in search and rescue operations within complex rubble sites. Traditional Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) face significant limitations in such confined and obstructed environments. This paper introduces a novel vine robot designed to navigate dense rubble, drawing inspiration from natural growth mechanisms found in plants. Unlike conventional robots, vine robots are soft robots that can grow by everting their material, allowing them to navigate through narrow spaces and obstacles. The prototype presented in this study incorporates pneumatic muscles for steering and oscillation, an equation-based robot length control plus feedback pressure regulating system for extending and retracting the robot body. We conducted a series of controlled experiments in an artificial rubble testbed to assess the robot performance under varying environmental conditions and robot parameters, including volume ratio, environmental weight, oscillation, and steering. The results show that the vine robot can achieve significant penetration depths in cluttered environments with mixed obstacle sizes and weights, and can maintain repeated trajectories, demonstrating potential for mapping and navigating complex underground paths. Our findings highlight the suitability of the vine robot for urban search and rescue missions, with further research planned to enhance its robustness and deployability in real-world scenarios.