Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning a Multi-Objective Reward Function for Creating Teams of Robotic Bodyguards Using Deep Reinforcement Learning
Paper and Code
Jan 28, 2019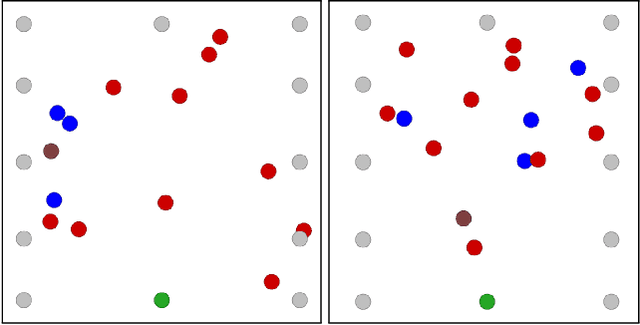
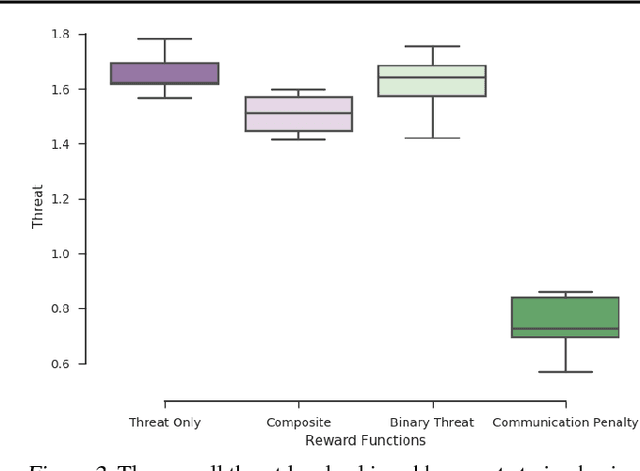
We are considering a scenario where a team of bodyguard robots provides physical protection to a VIP in a crowded public space. We use deep reinforcement learning to learn the policy to be followed by the robots. As the robot bodyguards need to follow several difficult-to-reconcile goals, we study several primitive and composite reward functions and their impact on the overall behavior of the robotic bodyguards.
* Accepted at the 1st Workshop on Goal Specifications for Reinforcement
Learning at ICML 2018
View paper on