 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning a Hair-Clip Inspired Bistable Mechanism for Soft Fish Robots
Paper and Code
Nov 06, 2023
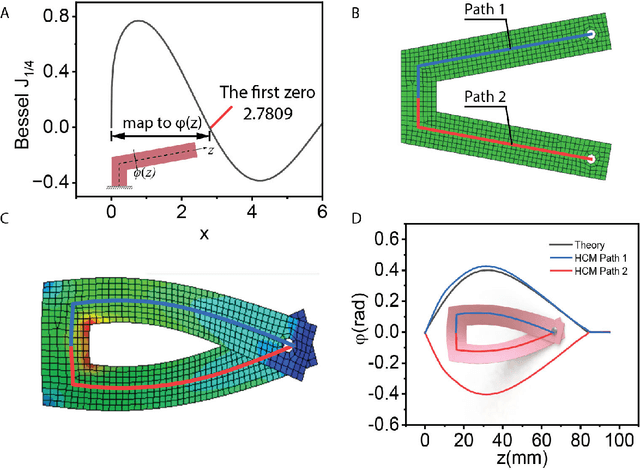
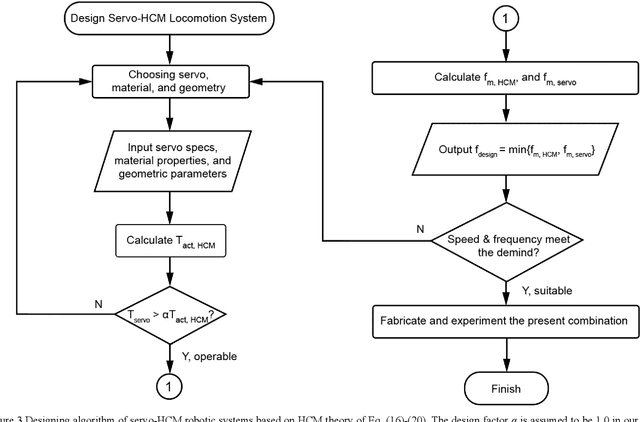

The Hair clip mechanism (HCM) is an in-plane prestressed bistable mechanism proposed in our previous research [1]~[5] to enhance the functionality of soft robotics. HCMs have several advantages, such as high rigidity, high mobility, good repeatability, and design and fabrication simplicity, compared to existing soft and compliant robotics. Using our experience with fish robots, this work delves into designing a novel HCM robotic propulsion system made from PETG plastic, carbon fiber-reinforced plastic (CFRP), and steel. Detailed derivation and verification of the HCM theory are given, and the influence of key parameters like dimensions, material types, and servo motor specifications are summarized. The designing algorithm offers insight into HCM robotics. It enables us to search for suitable components, operate robots at a desired frequency, and achieve high-frequency and high-speed undulatory swimming for fish robots.