 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and experimental investigation of a vibro-impact self-propelled capsule robot with orientation control
Paper and Code
Mar 01, 2022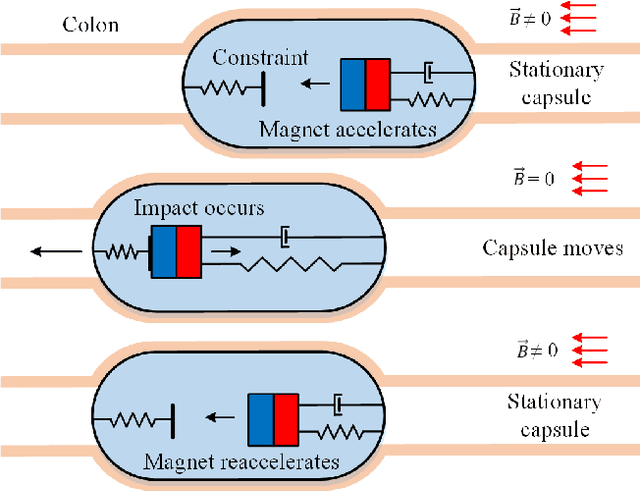
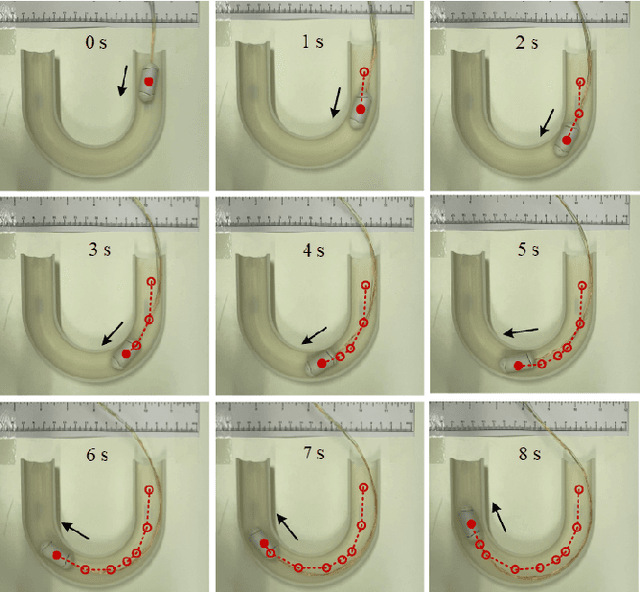
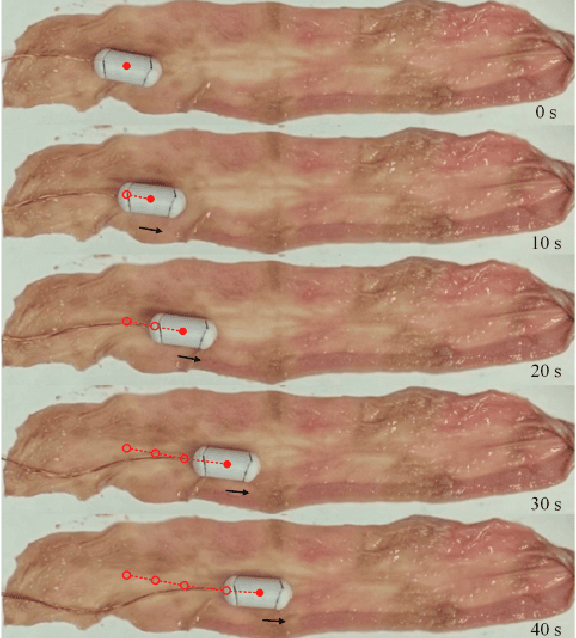
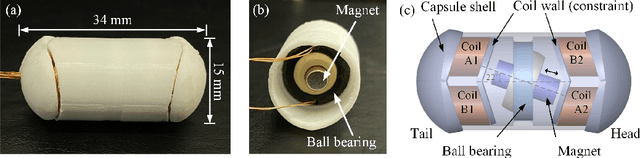
This paper presents a novel design and experimental investigation for a self-propelled capsule robot that can be used for painless colonoscopy during a retrograde progression from the patient's rectum. The steerable robot is driven forward and backward via its internal vibration and impact with orientation control by using an electromagnetic actuator. The actuator contains four sets of coils and a shaft made by permanent magnet. The shaft can be excited linearly in a controllable and tilted angle, so guide the progression orientation of the robot. Two control strategies are studied in this work and compared via simulation and experiment. Extensive results are presented to demonstrate the progression efficiency of the robot and its potential for robotic colonoscopy.