 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth-Guided Sparse Structure-from-Motion for Movies and TV Shows
Paper and Code
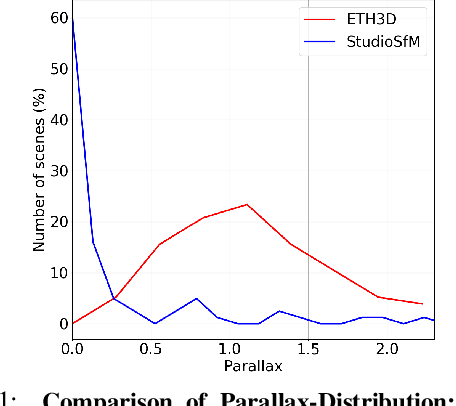
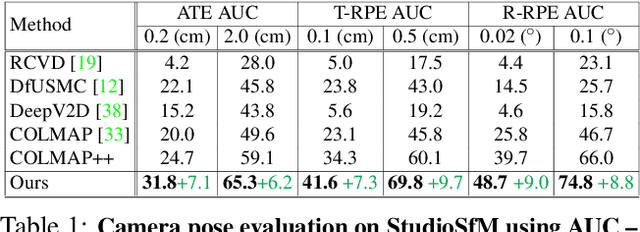
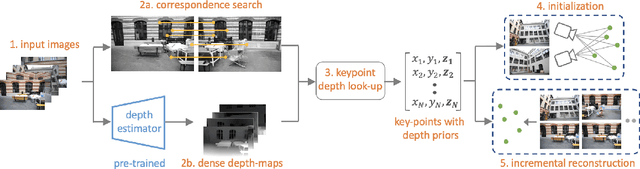
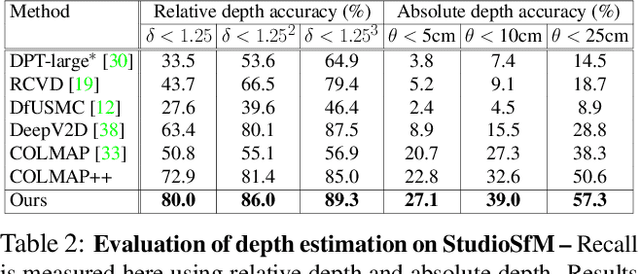
Existing approaches for Structure from Motion (SfM) produce impressive 3-D reconstruction results especially when using imagery captured with large parallax. However, to create engaging video-content in movies and TV shows, the amount by which a camera can be moved while filming a particular shot is often limited. The resulting small-motion parallax between video frames makes standard geometry-based SfM approaches not as effective for movies and TV shows. To address this challenge, we propose a simple yet effective approach that uses single-frame depth-prior obtained from a pretrained network to significantly improve geometry-based SfM for our small-parallax setting. To this end, we first use the depth-estimates of the detected keypoints to reconstruct the point cloud and camera-pose for initial two-view reconstruction. We then perform depth-regularized optimization to register new images and triangulate the new points during incremental reconstruction. To comprehensively evaluate our approach, we introduce a new dataset (StudioSfM) consisting of 130 shots with 21K frames from 15 studio-produced videos that are manually annotated by a professional CG studio. We demonstrate that our approach: (a) significantly improves the quality of 3-D reconstruction for our small-parallax setting, (b) does not cause any degradation for data with large-parallax, and (c) maintains the generalizability and scalability of geometry-based sparse SfM. Our dataset can be obtained at https://github.com/amazon-research/small-baseline-camera-tracking.