 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDensity Invariant Contrast Maximization for Neuromorphic Earth Observations
Paper and Code
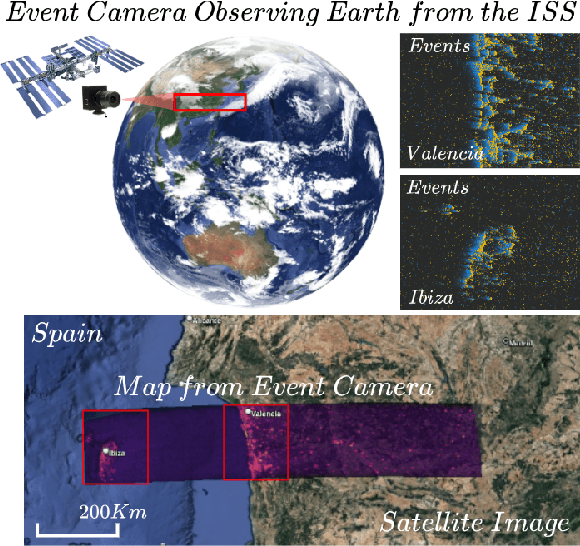
Contrast maximization (CMax) techniques are widely used in event-based vision systems to estimate the motion parameters of the camera and generate high-contrast images. However, these techniques are noise-intolerance and suffer from the multiple extrema problem which arises when the scene contains more noisy events than structure, causing the contrast to be higher at multiple locations. This makes the task of estimating the camera motion extremely challenging, which is a problem for neuromorphic earth observation, because, without a proper estimation of the motion parameters, it is not possible to generate a map with high contrast, causing important details to be lost. Similar methods that use CMax addressed this problem by changing or augmenting the objective function to enable it to converge to the correct motion parameters. Our proposed solution overcomes the multiple extrema and noise-intolerance problems by correcting the warped event before calculating the contrast and offers the following advantages: it does not depend on the event data, it does not require a prior about the camera motion, and keeps the rest of the CMax pipeline unchanged. This is to ensure that the contrast is only high around the correct motion parameters. Our approach enables the creation of better motion-compensated maps through an analytical compensation technique using a novel dataset from the International Space Station (ISS). Code is available at \url{https://github.com/neuromorphicsystems/event_warping}