 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDefensive Escort Teams via Multi-Agent Deep Reinforcement Learning
Paper and Code
Oct 09, 2019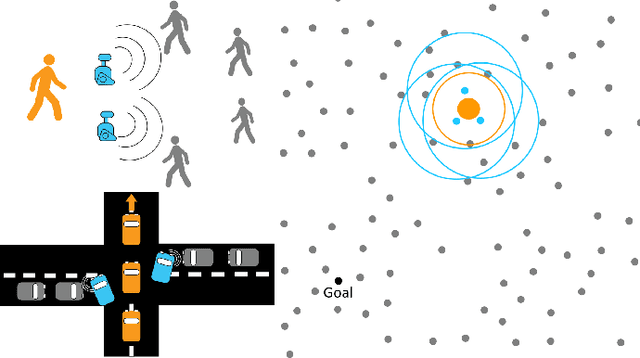
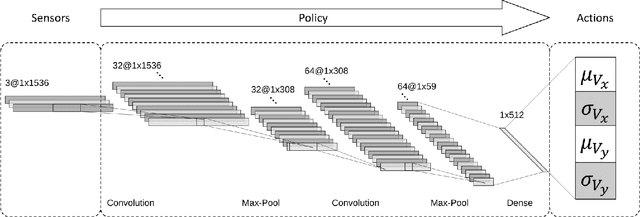
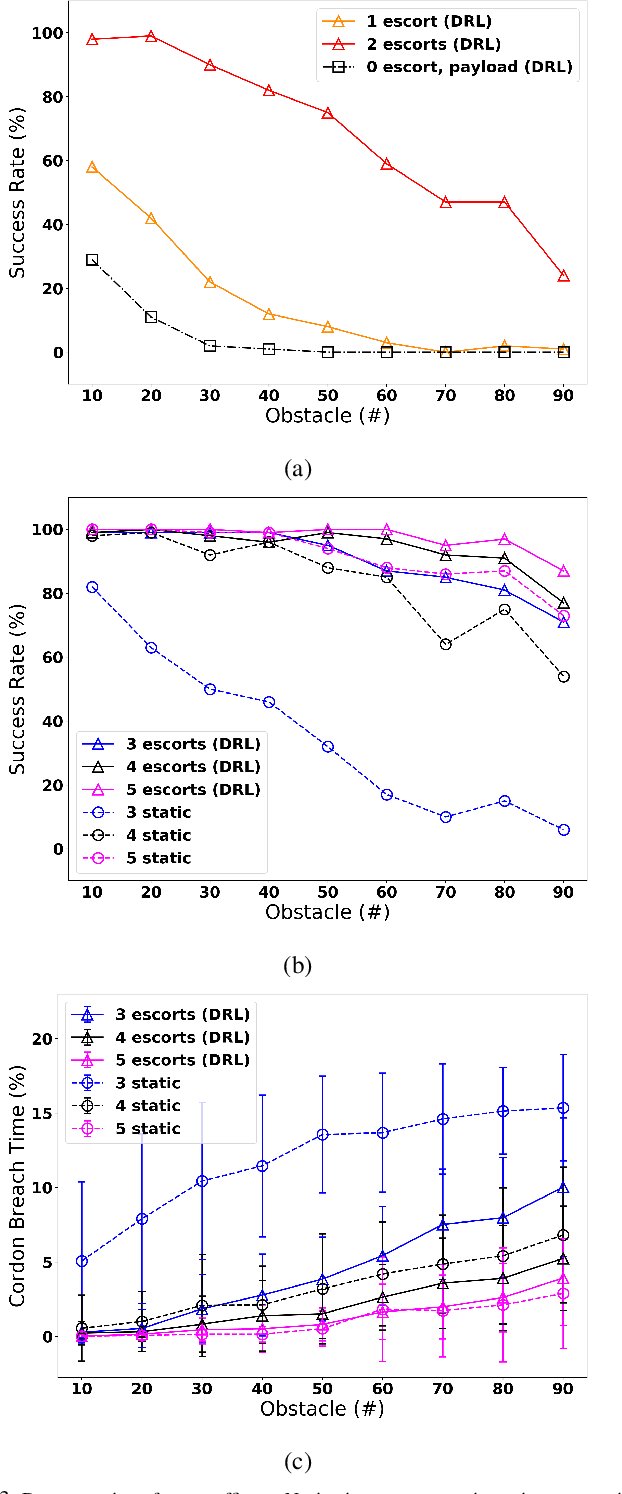
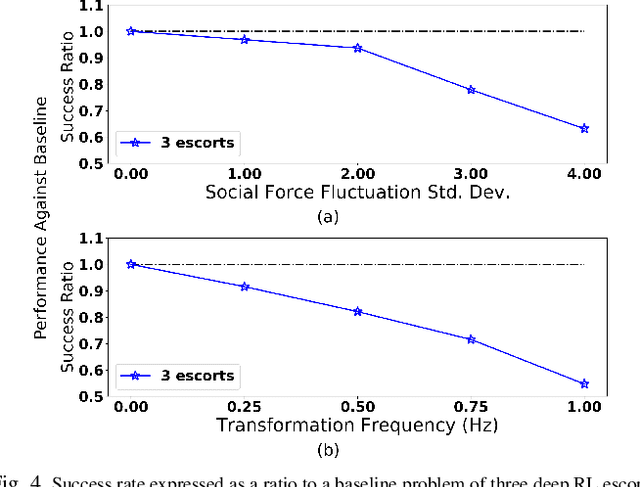
Coordinated defensive escorts can aid a navigating payload by positioning themselves in order to maintain the safety of the payload from obstacles. In this paper, we present a novel, end-to-end solution for coordinating an escort team for protecting high-value payloads. Our solution employs deep reinforcement learning (RL) in order to train a team of escorts to maintain payload safety while navigating alongside the payload. This is done in a distributed fashion, relying only on limited range positional information of other escorts, the payload, and the obstacles. When compared to a state-of-art algorithm for obstacle avoidance, our solution with a single escort increases navigation success up to 31%. Additionally, escort teams increase success rate by up to 75% percent over escorts in static formations. We also show that this learned solution is general to several adaptations in the scenario including: a changing number of escorts in the team, changing obstacle density, and changes in payload conformation. Video: https://youtu.be/SoYesKti4VA.