Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepSignals: Predicting Intent of Drivers Through Visual Signals
Paper and Code
May 03, 2019

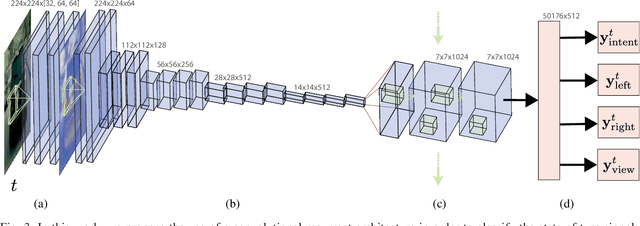
Detecting the intention of drivers is an essential task in self-driving, necessary to anticipate sudden events like lane changes and stops. Turn signals and emergency flashers communicate such intentions, providing seconds of potentially critical reaction time. In this paper, we propose to detect these signals in video sequences by using a deep neural network that reasons about both spatial and temporal information. Our experiments on more than a million frames show high per-frame accuracy in very challenging scenarios.
* To be presented at the IEEE International Conference on Robotics and
Automation (ICRA), 2019
View paper on