Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Representation Learning and Clustering of Traffic Scenarios
Paper and Code
Jul 15, 2020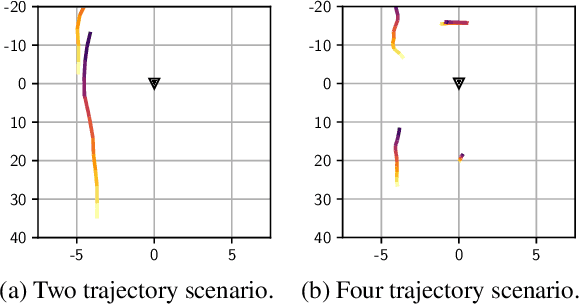

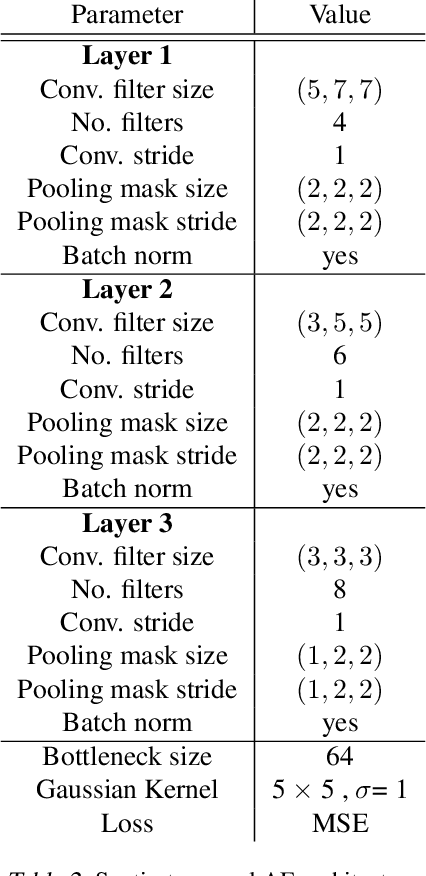
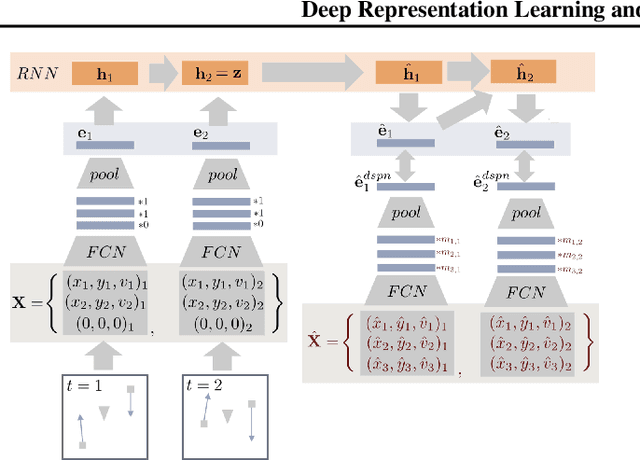
Determining the traffic scenario space is a major challenge for the homologation and coverage assessment of automated driving functions. In contrast to current approaches that are mainly scenario-based and rely on expert knowledge, we introduce two data driven autoencoding models that learn a latent representation of traffic scenes. First is a CNN based spatio-temporal model that autoencodes a grid of traffic participants' positions. Secondly, we develop a pure temporal RNN based model that auto-encodes a sequence of sets. To handle the unordered set data, we had to incorporate the permutation invariance property. Finally, we show how the latent scenario embeddings can be used for clustering traffic scenarios and similarity retrieval.
* Workshop on AI for Autonomous Driving, International Conference on
Machine Learning (ICML) 2020
View paper on