 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep reinforcement learning for optimal well control in subsurface systems with uncertain geology
Paper and Code
Mar 24, 2022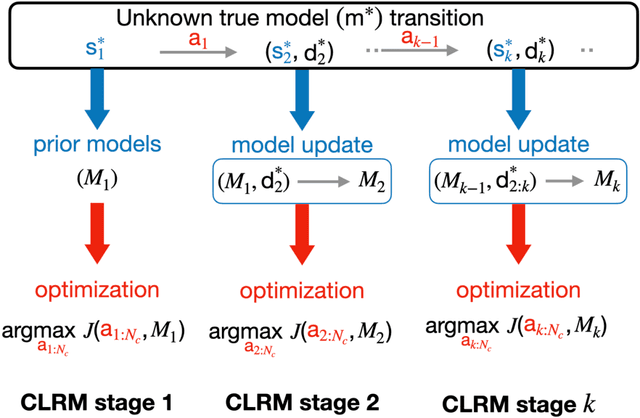

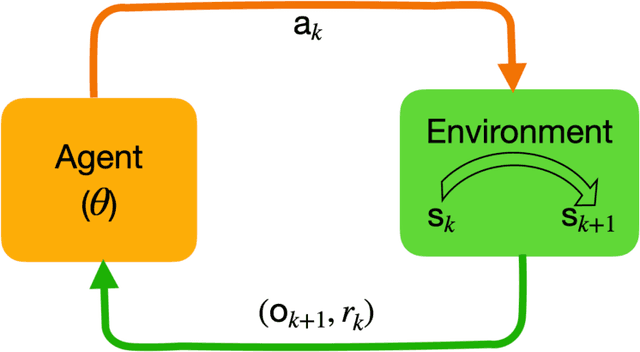
A general control policy framework based on deep reinforcement learning (DRL) is introduced for closed-loop decision making in subsurface flow settings. Traditional closed-loop modeling workflows in this context involve the repeated application of data assimilation/history matching and robust optimization steps. Data assimilation can be particularly challenging in cases where both the geological style (scenario) and individual model realizations are uncertain. The closed-loop reservoir management (CLRM) problem is formulated here as a partially observable Markov decision process, with the associated optimization problem solved using a proximal policy optimization algorithm. This provides a control policy that instantaneously maps flow data observed at wells (as are available in practice) to optimal well pressure settings. The policy is represented by a temporal convolution and gated transformer blocks. Training is performed in a preprocessing step with an ensemble of prior geological models, which can be drawn from multiple geological scenarios. Example cases involving the production of oil via water injection, with both 2D and 3D geological models, are presented. The DRL-based methodology is shown to result in an NPV increase of 15% (for the 2D cases) and 33% (3D cases) relative to robust optimization over prior models, and to an average improvement of 4% in NPV relative to traditional CLRM. The solutions from the control policy are found to be comparable to those from deterministic optimization, in which the geological model is assumed to be known, even when multiple geological scenarios are considered. The control policy approach results in a 76% decrease in computational cost relative to traditional CLRM with the algorithms and parameter settings considered in this work.