 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Adaptive Traffic Signal Control
Paper and Code
Nov 14, 2019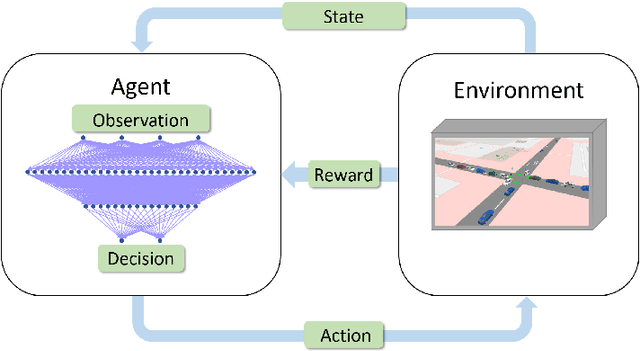
Many existing traffic signal controllers are either simple adaptive controllers based on sensors placed around traffic intersections, or optimized by traffic engineers on a fixed schedule. Optimizing traffic controllers is time consuming and usually require experienced traffic engineers. Recent research has demonstrated the potential of using deep reinforcement learning (DRL) in this context. However, most of the studies do not consider realistic settings that could seamlessly transition into deployment. In this paper, we propose a DRL-based adaptive traffic signal control framework that explicitly considers realistic traffic scenarios, sensors, and physical constraints. In this framework, we also propose a novel reward function that shows significantly improved traffic performance compared to the typical baseline pre-timed and fully-actuated traffic signals controllers. The framework is implemented and validated on a simulation platform emulating real-life traffic scenarios and sensor data streams.