Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning Based Robot Arm Manipulation with Efficient Training Data through Simulation
Paper and Code
Sep 06, 2019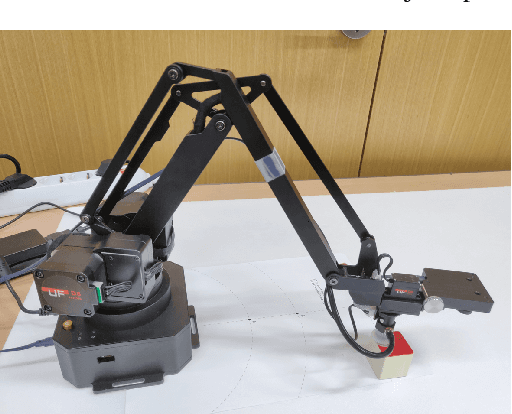

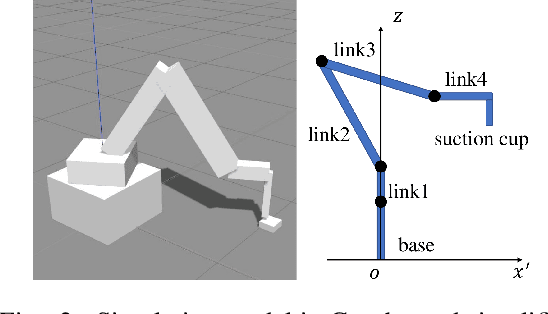
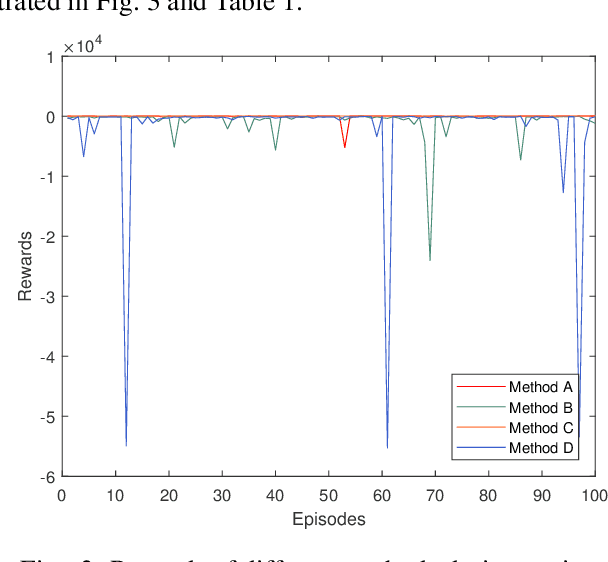
Deep reinforcement learning trains neural networks using experiences sampled from the replay buffer, which is commonly updated at each time step. In this paper, we propose a method to update the replay buffer adaptively and selectively to train a robot arm to accomplish a suction task in simulation. The response time of the agent is thoroughly taken into account. The state transitions that remain stuck at the boundary of constraint are not stored. The policy trained with our method works better than the one with the common replay buffer update method. The result is demonstrated both by simulation and by experiment with a real robot arm.
* Appearing in The 19th International Conference on Control, Automation
and Systems, Jeju, Korea, 2019
View paper on